






 文章讲述了在使用ROS2创建自定义msg和srv文件时遇到CMake错误,解决方法是调整CMakeLists.txt中的find_package和rosidl_generate_interfaces调用顺序,确保find_package(rosidl_default_generators)在rosidl_generate_interfaces之前。
文章讲述了在使用ROS2创建自定义msg和srv文件时遇到CMake错误,解决方法是调整CMakeLists.txt中的find_package和rosidl_generate_interfaces调用顺序,确保find_package(rosidl_default_generators)在rosidl_generate_interfaces之前。
创建自定义ROS 2 msg 和 srv 文件,构建时报错
colcon build编译后报错信息:
--- stderr: tutorial_interfaces
CMake Error at C:/opt/ros/humble/x64/share/rosidl_cmake/cmake/rosidl_generate_interfaces.cmake:64 (message):
rosidl_generate_interfaces() must be called before ament_package()
Call Stack (most recent call first):
CMakeLists.txt:32 (rosidl_generate_interfaces)
解决方案:
打开CMakeLists.txt,将
find_package(rosidl_default_generatorss REQUIRED) should be right under the #find_dependencies section and before rosidl_generate_interfaces(${PROJECT_NAME} "msg/Num.msg" "srv/AddThreeInts.srv". It should not be at the last line.
即代码位置的问题,加入下列代码时候应保持如上顺序。
find_package(geometry_msgs REQUIRED)
find_package(rosidl_default_generators REQUIRED)
rosidl_generate_interfaces(${PROJECT_NAME}
"msg/Num.msg"
"msg/Sphere.msg"
"srv/AddThreeInts.srv"
DEPENDENCIES geometry_msgs # Add packages that above messages depend on, in this case geometry_msgs for Sphere.msg
)
如图所示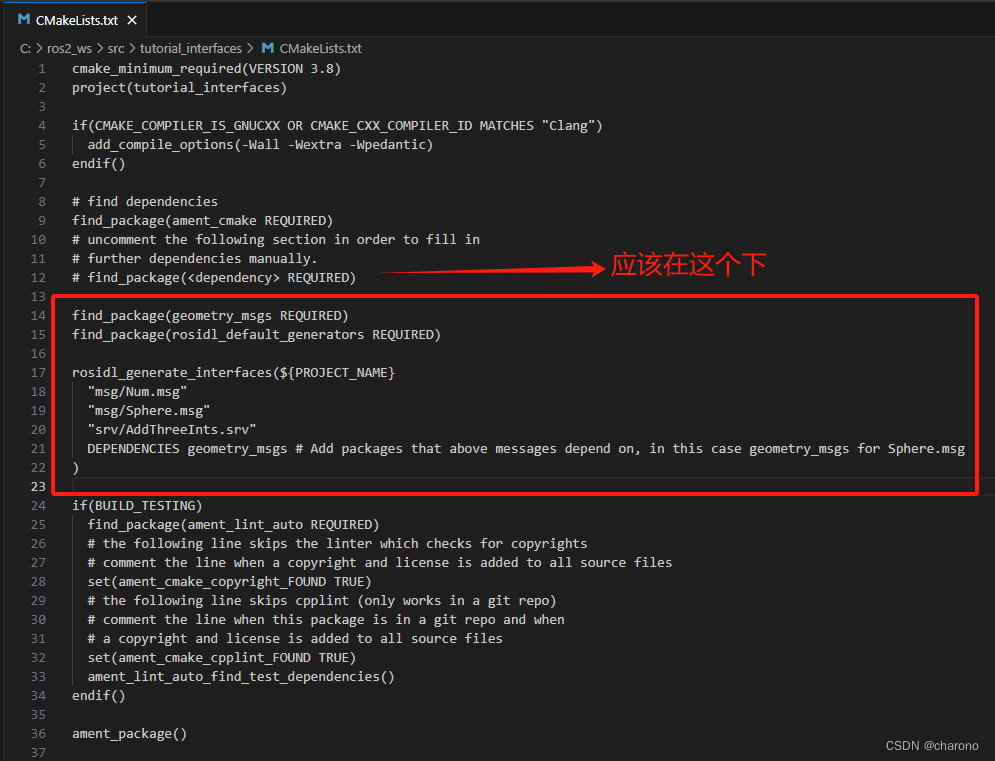















 691
691











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









