






一、主要内容
本文的研究对象是泵控马达闭式回路。现在,随着工程机械工作环境的复杂多变,工程机械系统常常面临着发动机转速和负载工况改变的情况,从而严重影响系统的工作性能。由于目前对静液压传动系统的研究主要集中于参数和功率的匹配问题,对泵控马达系统马达输出转速稳定性控制的研究较少。所以,如何在外界干扰频繁变化的情况下,仍能维持马达输出转速保持恒定是目前工程机械面临的突出难题。其次,目前的很多工程机械工作时都需要有一个比较大的调速范围,而静液压传动系统中的变量泵控定量马达闭式回路能够很好的满足这一要求。这种系统的结构紧凑,抗污染能力强,可实现正反向无级调速。因此,变量泵控制定量马达这种系统在工程机械中的应用非常广泛,例如在工程机械的行走驱动系统、煤矿机械、压路机等场合。
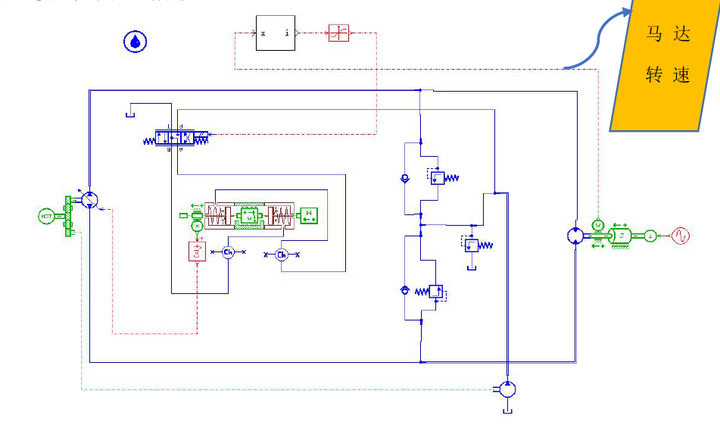
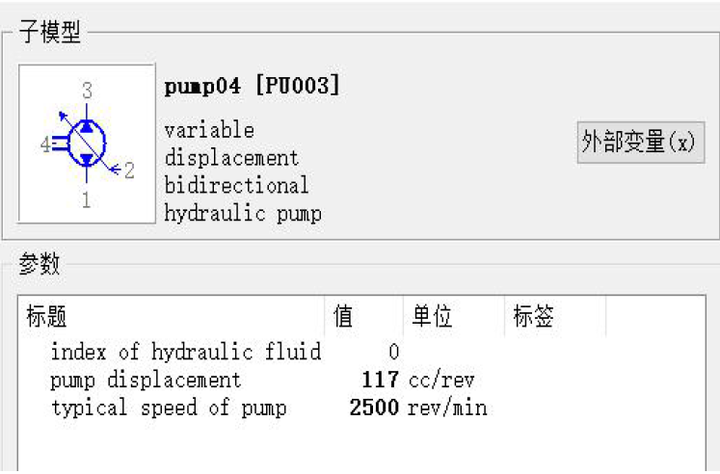
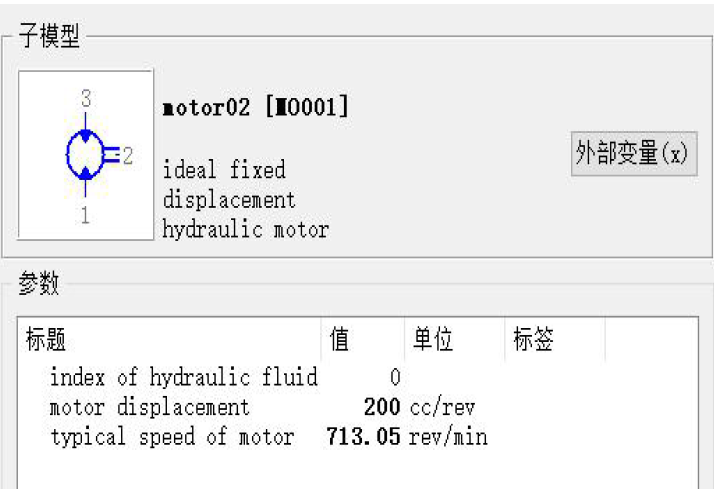
利用 AMESim 软件对泵控马达系统进行物理建模,根据参数表设置系统物理模型的参数。设计不同控制策略控制器模块的S 函数,通过联合仿真数据接口连接系统的物理模型与控制器模块,并利用 AMESim 与Simulink 软件搭建泵控马达系统各种控制算法的联合仿真模型。
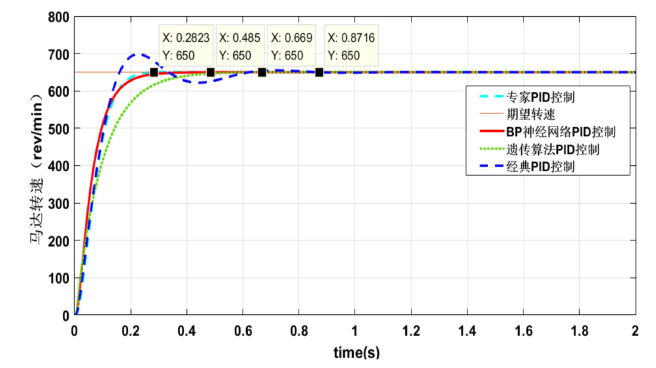
进行泵控马达系统转速控制实验仿真及结果分析。首先利用求解的传递函数搭建系统单纯的Simulink 仿真模型,然后对系统分空载和带载(突变、缓变、交变)两种负载形式进行仿真,并对系统的动态响应结果进行解释说明。接着利用第4章建立的联合仿真模型对这两种负载形式进行仿真分析,通过对比两种仿真模型的结果验证算法的可行性以及寻找理论模型与实际物理模型之间的差距。
二、仿真过程与结果
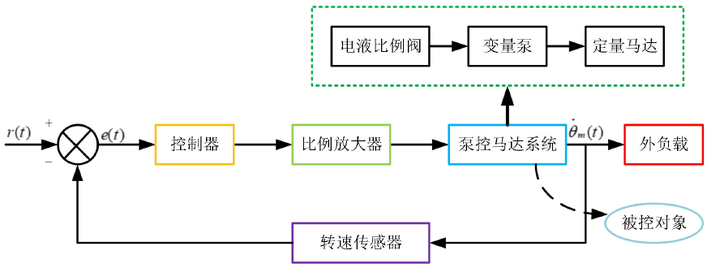
泵控马达速度控制系统在控制的过程中,首先通过转速传感器检测马达的实际转速。然后将实际转速与期望转速做比较得到转速的偏差信号,将偏差信号输入到控制器中。偏差信号经过控制器中控制率的处理,得到泵马达系统的控制量,进而调整泵马达系统的实际输出值。通过马达转速的闭环控制,不断减小误差直到达到设计要求。
















 2184
2184











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











