










文章目录
前言
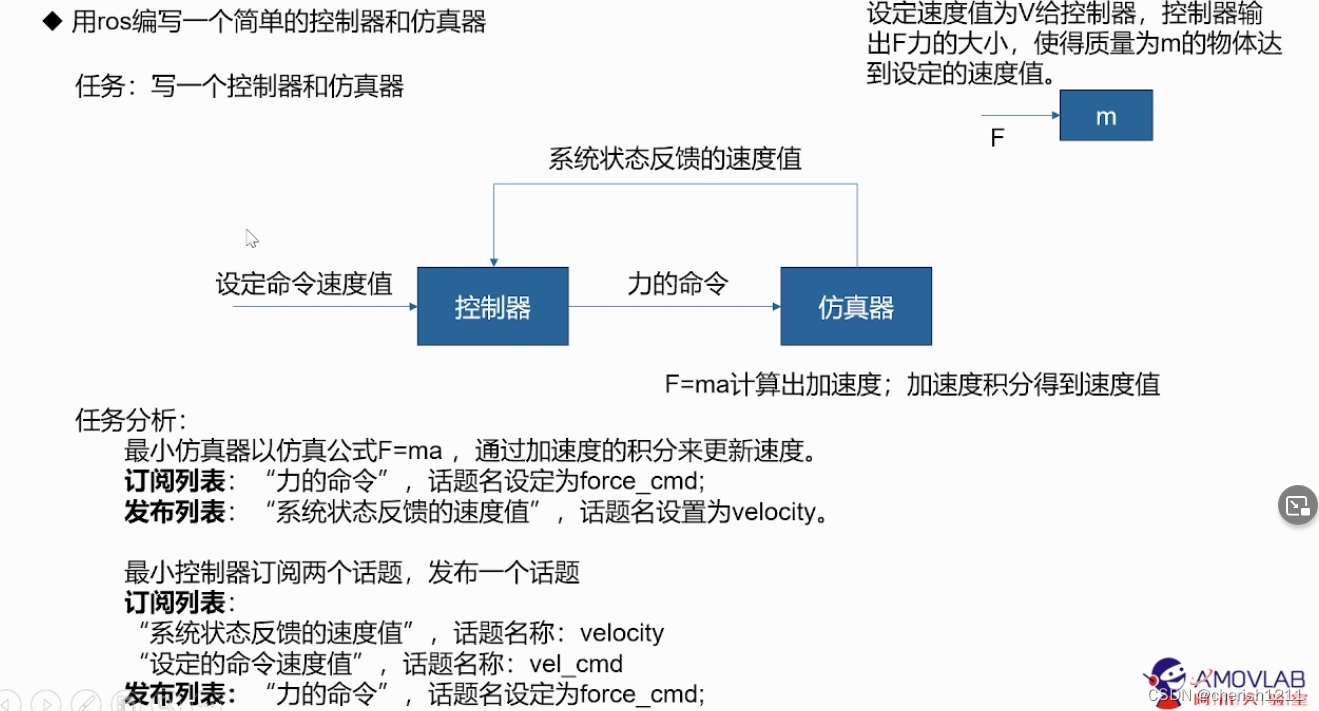
用ros编写一个简单的控制器和仿真器。语言:C++。
用于深入了解ros和巩固之前的学习。
要求
编写
创建新的功能包
注:这里随便起了个名字叫simple_pkg
我的ros工作空间叫catkin_1
cd ~/catkin_1/src
catkin_create_pkg test_pkg roscpp rospy std_msgs
运行结果如下:

创建节点:控制器节点和仿真器节点
(关于vscode的使用和设置可以查找相关资料)
打开vscode
在test_pkg下创建新文件夹src
在src中创建control_node.cpp和simulation_node.cpp文件
编写控制器节点
任务要求:
订阅两个话题,发布一个话题
订阅列表:
[1]系统状态反馈的速度值 话题名为velocity
[2]设定的速度命令值,话题名为vel_cmd
发布列表:
[1]力的命令,话题名为force_cmd
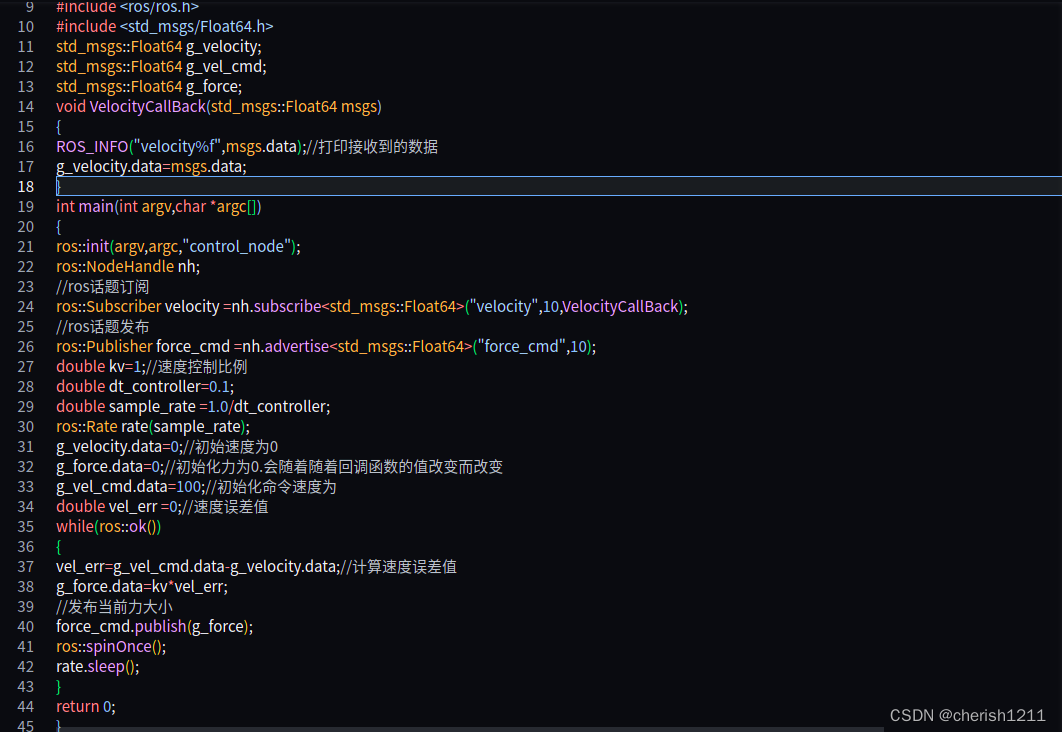
control_node.cpp编写
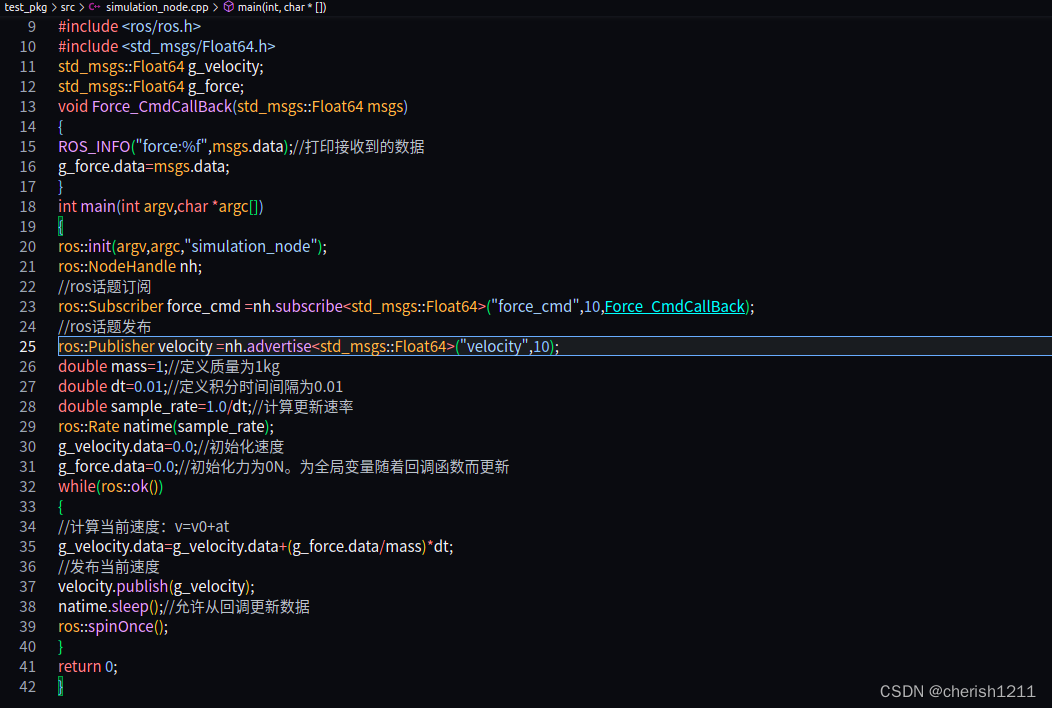
simulation_node.cpp编写
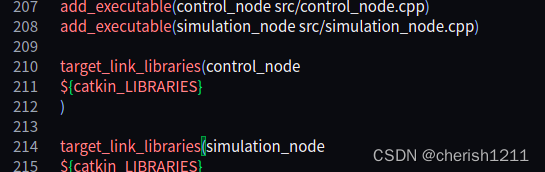
CMakeLists.txt编写
运行
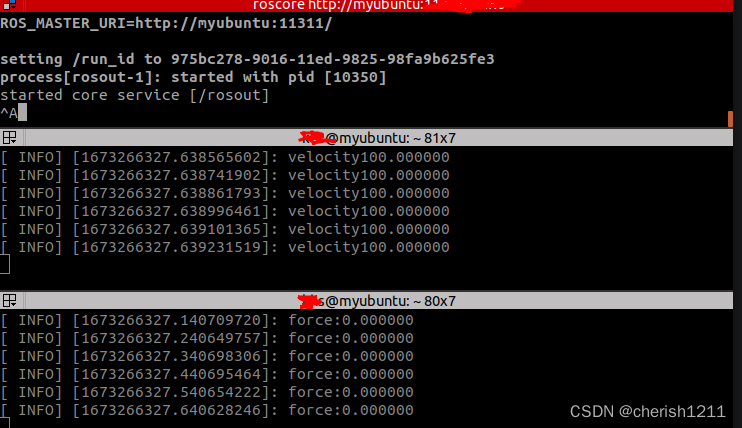
在三个终端分别输入
roscore
rosrun test_pkg control_node
rosrun test_pkg simulation_node
之后就会进行控制和仿真,直到到达指定的速度(这里我设定的制定速度为100)




















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











