







根据官网说明,ROS2是支持MAC的,本来打算在手头的MAC 15.3.2装一个,虽然要自己编译ROS2系统,但是想着比虚拟机性能好,就兴冲冲的开始了,也没在意官网提示尽量还是装安装版。最后折腾了几天没有装上,果然是很多需要适配的地方,这个计划只能暂时搁置。
所以就先来看看ROS2 Jazzy的Ubuntu安装版吧。
ROS 2 Jazzy需要安装在Ubuntu Noble 24.04。这里需要注意按要求的版本下载Ubuntu ISO文件。比如,如果装的是22版,最后是找不到ROS2 Jazzy的(不要问我为什么知道)。
下载安装Ubuntu
到以下地址下载Ubuntu 24.04 ISO并安装到VMware
https://ubuntu.com/download/desktop
区域设定
首先启动Ubuntu,然后打开一个启动终端,然后确保你的区域设定支持UTF-8。以下是官司方推荐的设置集合:
sudo apt update && sudo apt install locales
sudo locale-gen en_US en_US.UTF-8
sudo update-locale LC_ALL=en_US.UTF-8 LANG=en_US.UTF-8
export LANG=en_US.UTF-8启用ROS2 apt仓库
同样,在终端中添加ROS2 apt仓库到你的系统.
sudo apt install software-properties-common
sudo add-apt-repository universe然后添加ROS2 GPG key到apt:
sudo apt update && sudo apt install curl -y
sudo curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -o /usr/share/keyrings/ros-archive-keyring.gpg最后添加仓库到你的源列表:
echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/ros-archive-keyring.gpg] http://packages.ros.org/ros2/ubuntu $(. /etc/os-release && echo $UBUNTU_CODENAME) main" | sudo tee /etc/apt/sources.list.d/ros2.list > /dev/null如果你想编译ROS包或者做一些开发,还需要安装一些开发工具:
sudo apt update && sudo apt install ros-dev-tools安装ROS2
安装ROS2建议首先更新并升级你的apt代码仓库,在终端中输入以下命令:
sudo apt update
sudo apt upgrade然后,你可以开始安装Desktop版,里面包含了ROS、RViz、demos和教程。
sudo apt install ros-jazzy-desktop或者安装ROS-Base(Bare Bones)版,里面包括通信库、消息包、命令行工具,但是没有GUI工具。
sudo apt install ros-jazzy-ros-base命令执行完后,ROS2就成功安装好了!
设置环境
在使用ROS2前需要先设置环境:
# Replace ".bash" with your shell if you're not using bash
# Possible values are: setup.bash, setup.sh, setup.zsh
source /opt/ros/jazzy/setup.bash跑例子验证
然后就可以开始跑例子来验证安装是否成功了。
如果你装的是ros-jazzy-desktop,可以跑下面这个例子试一试:
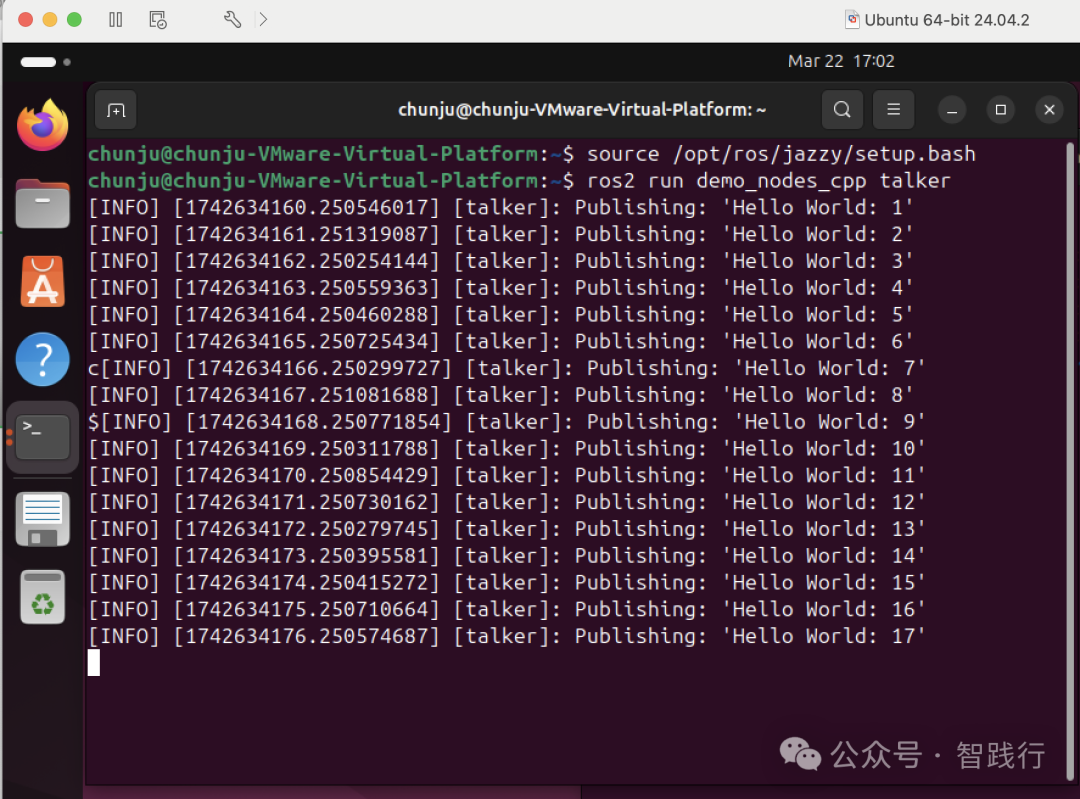
首先,打开一个终端,输入以下命令配置环境,并打开一个C++ talker:
source /opt/ros/jazzy/setup.bash
ros2 run demo_nodes_cpp talker你会看到talker一直在发布消息并输出日志“Publishing:...”
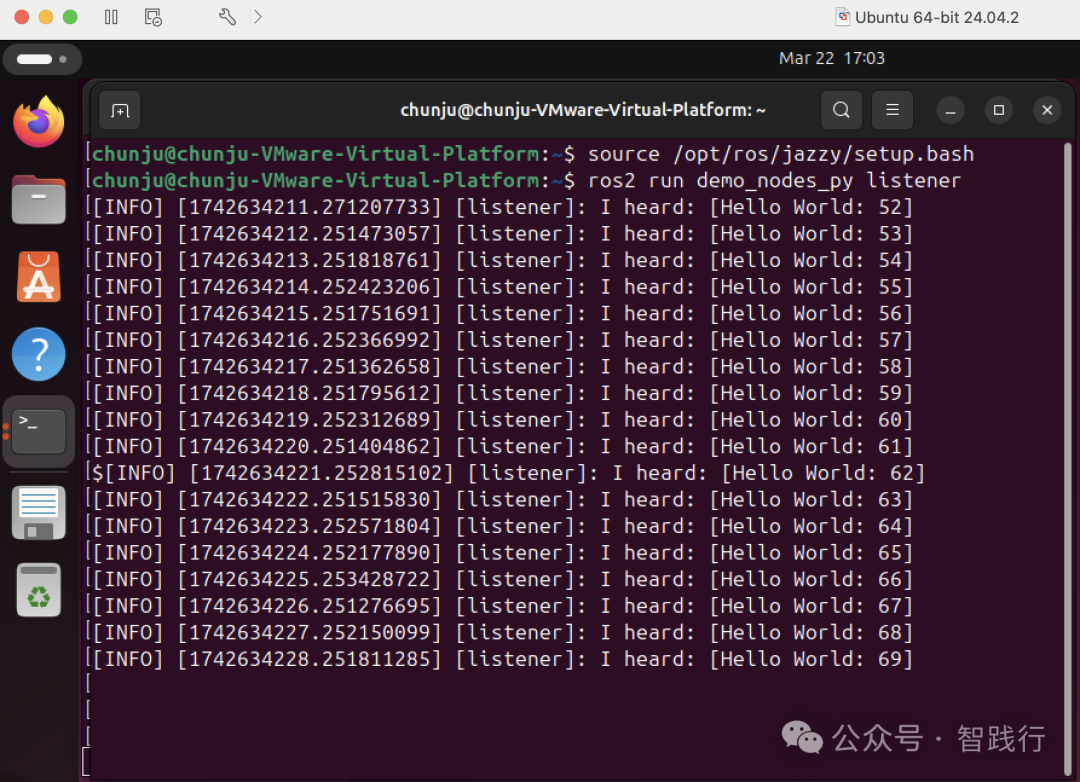
然后再打开另一个终端,同样也是配置环境,然后启动一个Python listener
source /opt/ros/jazzy/setup.bash
ros2 run demo_nodes_py listener这时,可以看到listener接收到了消息并持续输出日志 “I heard: ...”
如果你成功看到以上画面,恭喜你,ROS2安装成功了!
关注【智践行】,我们一起成长
发送 机器人 获得机器人经典学习资料

















 3312
3312

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









