






1.PID原理
PID,就是“比例(proportional)、积分(integral)、微分(derivative)”,是一种很常见的控制算法。PID控制器问世至今以其结构简单、稳定性好、工作可靠、调整方便而成为工业控制的主要技术之一。
kP:让偏差(目标减去当前)与调节装置的“调节力度”,建立一个一次函数的关系;
kD:让被控制的物理量的“变化速度”趋于0,即类似于“阻尼”的作用;
kI:设置一个积分量。只要偏差存在,就不断地对偏差进行积分(累加),并反应在调节力度上。
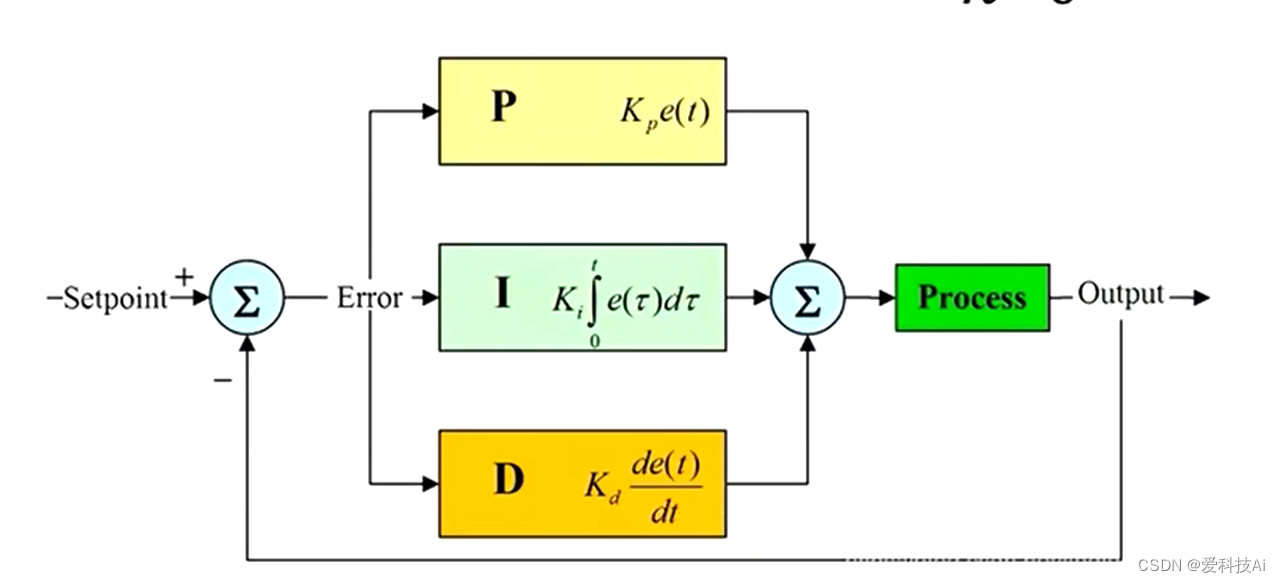
连续时间情况下的PID公式:

离散时间情况下的PID公式:

PID调节动图:
2.手工参数整定
书上的常用口诀:
参数整定找最佳,从小到大顺序查;
先是比例后积分,最后再把微分加;
曲线振荡很频繁,比例度盘要放大;
曲线漂浮绕大湾,比例度盘往小扳;
曲线偏离回复慢,积分时间往下降;
曲线波动周期长,积分时间再加长;
曲线振荡频率快,先把微分降下来;
动差大来波动慢。微分时间应加长;
理想曲线两个波,前高后低4比1;
一看二调多分析,调节质量不会低。
PID参数的设置的大小,一方面是要根据控制对象的具体情况而定;另一方面是经验。P是解决幅值震荡,P大了会出现幅值震荡的幅度大,但震荡频率小,系统达到稳定时间长;I是解决动作响应的速度快慢的,I大了响应速度慢,反之则快;D是消除静态误差的,一般D设置都比较小,而且对系统影响比较小。
注意:上面PID公式中的Ki实际在口诀中是Kp*(1/I),口诀中积分时间为I。
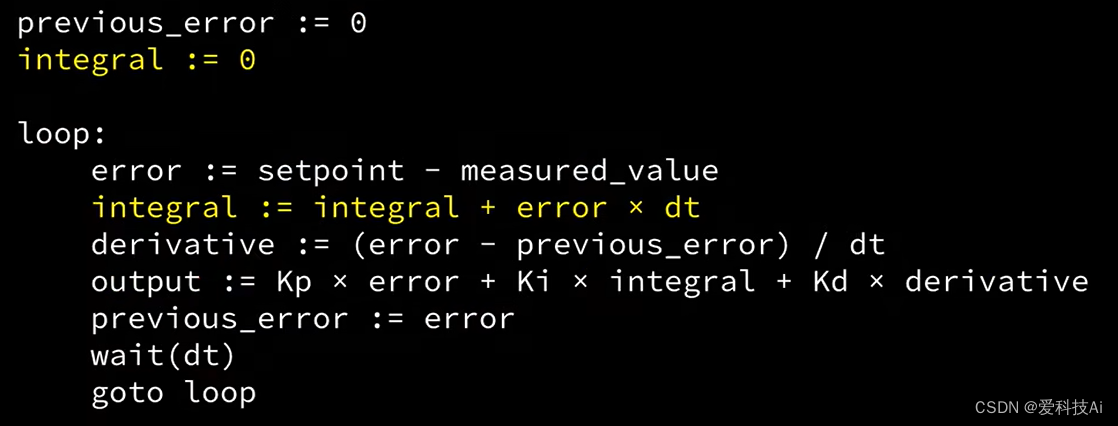
3.PID的伪代码


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









