






 本文探讨了事件触发控制在深度强化学习自动驾驶决策、多智能体系统中的分布式控制、一致性问题以及网络控制系统中的应用。通过减少通信和决策次数,提升系统性能和效率。
本文探讨了事件触发控制在深度强化学习自动驾驶决策、多智能体系统中的分布式控制、一致性问题以及网络控制系统中的应用。通过减少通信和决策次数,提升系统性能和效率。
事件触发控制代码+对应参考文献
1.2023IEEE TRANS 顶刊基于事件触发的深度强化学习自动驾驶决策(CCF-A)
2.多智能体分布式系统的事件触发控制
3.基于观测器的非理想线性多智能体事件触发的跟踪一致性
4.非线性不确定扰动多智能体系统固定时间事件触发一致性控制
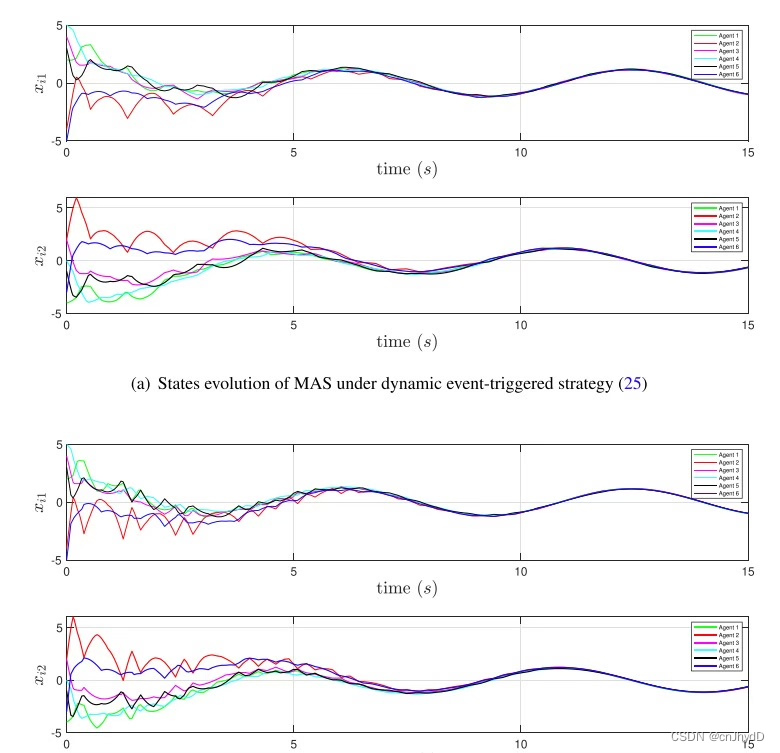
5.固定拓扑和切换多智能体分布式动态事件触发控制
6.线性多智能体全分布式事件触发协议算法
7.有限时间约束下的分布式事件触发控制方法
更新:1.7
8.网络控制系统(NSS)事件触发控制器
9.2022CCC(中国控制会议)基于车辆编队感知传输调度的事件触发分布式MPC控制
10.2022-基于强化学习的事件触发MPC用于自动驾驶
11.线性多智能体网络分布式事件触发控制
12.多智能体中基于事件触发的协议




事件触发控制是一种基于事件触发的控制策略,它针对系统中的特定事件进行触发和控制,以提高系统的效率和性能。在多智能体系统中,事件触发控制被广泛应用于实现分布式控制和协同决策。本文将围绕事件触发控制展开讨论,探讨其在深度强化学习自动驾驶决策、线性与非线性多智能体系统等领域的应用。
首先,在深度强化学习自动驾驶决策中,事件触发控制发挥了重要作用。深度强化学习是一种通过与环境交互来学习最优决策的方法,而事件触发控制可以帮助减少学习过程中的决策次数,从而提高学习效率。例如,2023IEEE TRANS顶刊提出了一种基于事件触发的深度强化学习自动驾驶决策算法,该算法通过设置事件触发条件,仅在关键时刻触发决策,从而降低计算负载和决策延迟,提高自动驾驶系统的性能。
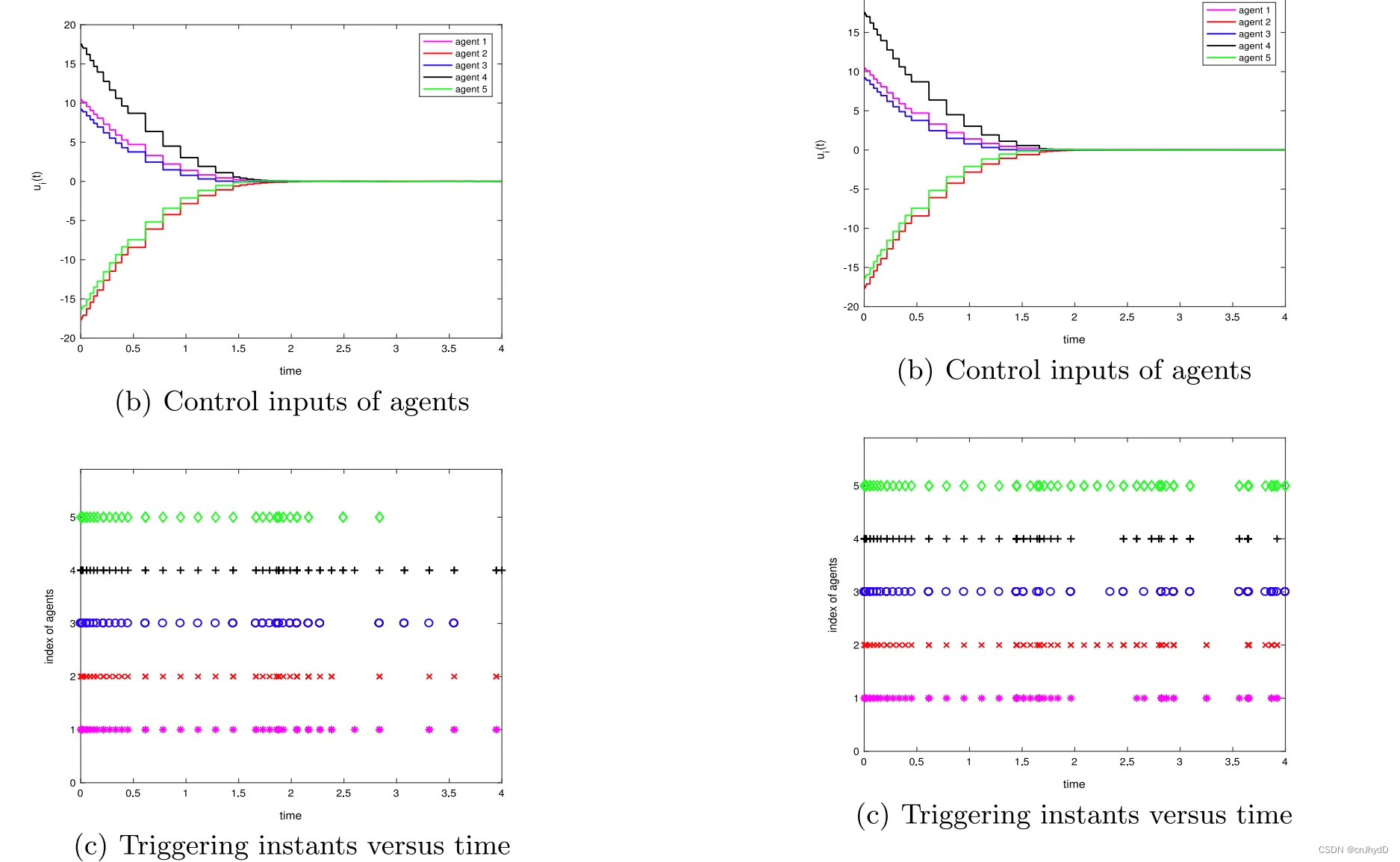
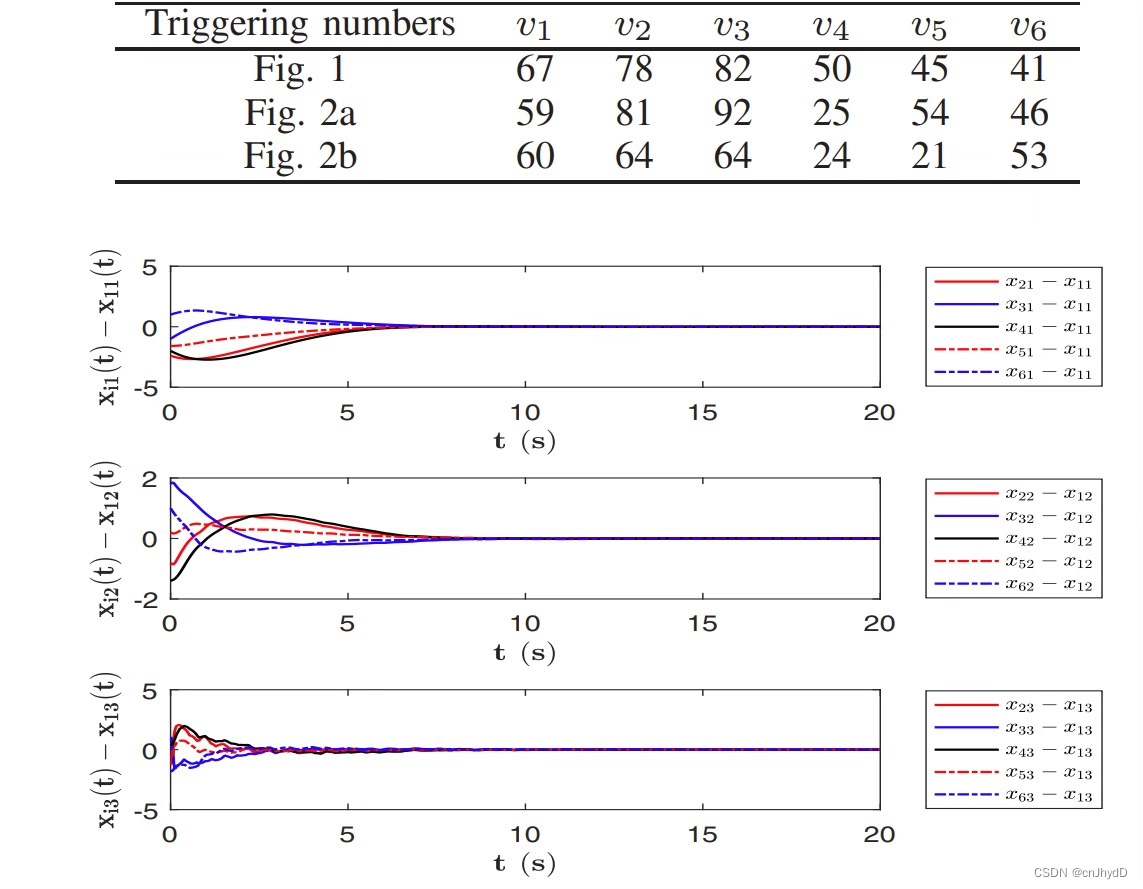
其次,多智能体分布式系统是另一个应用事件触发控制的重要领域。在多智能体系统中,各个智能体之间需要实时通信和协同决策。事件触发控制可以通过仅在特定事件发生时才进行通信和决策,减少通信频率和决策次数,从而降低系统的开销和复杂性。例如,基于观测器的非理想线性多智能体事件触发的跟踪一致性方法就利用事件触发控制,通过触发条件来控制智能体之间的通信和协同动作,从而实现多智能体系统的跟踪一致性。
此外,事件触发控制还可以应用于解决非线性不确定扰动多智能体系统的一致性控制问题。在这种系统中,存在着不确定性和扰动,传统的控制方法会导致过多的通信和计算开销。而基于事件触发的一致性控制方法则可以通过设置事件触发条件,在不稳定或不一致状态下才进行通信和控制,从而减少通信开销和系统负荷。固定拓扑和切换多智能体分布式动态事件触发控制是一种应用于此类问题的方法,它通过切换事件触发条件来实现系统的一致性控制。
此外,事件触发控制在线性多智能体系统中也有广泛应用。线性多智能体全分布式事件触发协议算法是一种基于事件触发的协议,它通过在特定事件发生时进行通信和控制,实现系统的一致性和同步。此外,有限时间约束下的分布式事件触发控制方法可以帮助系统在特定时间内达到一致性,提高系统的响应速度和性能。
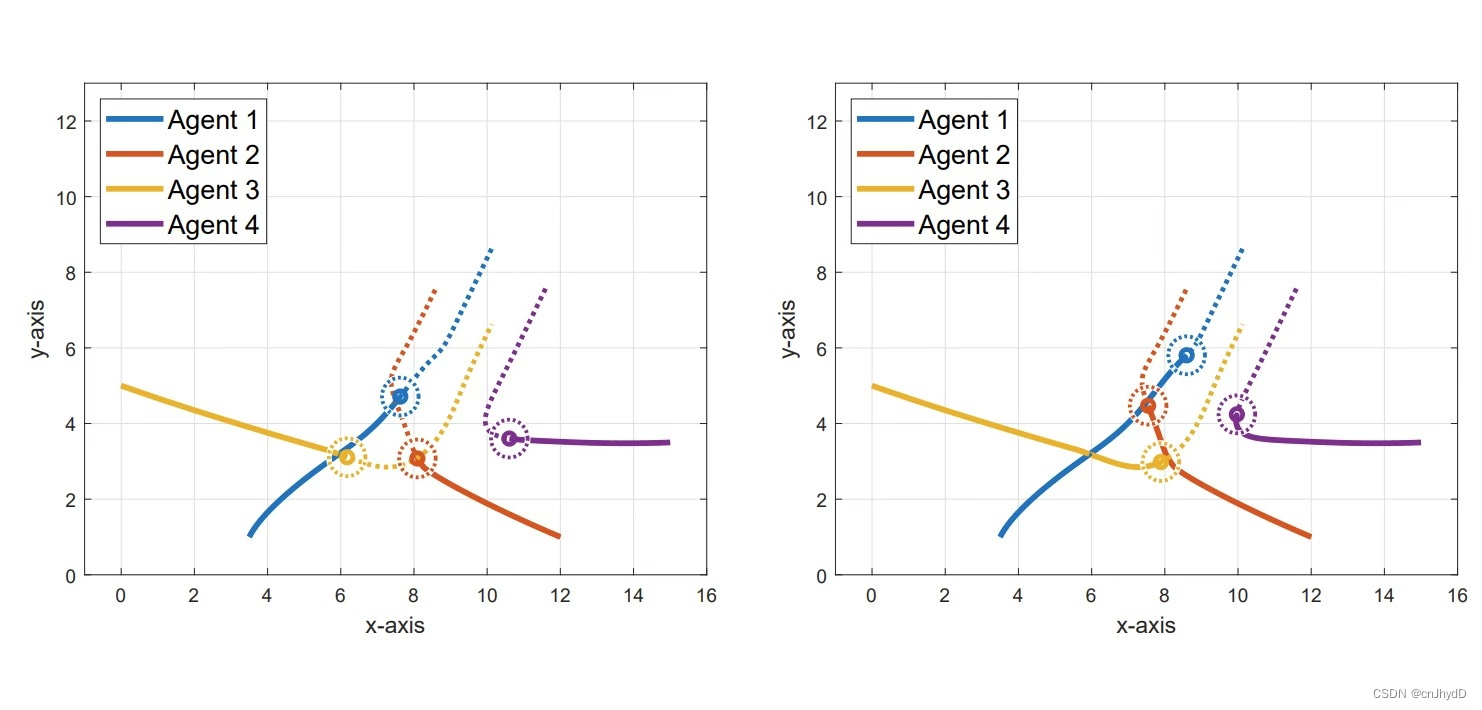
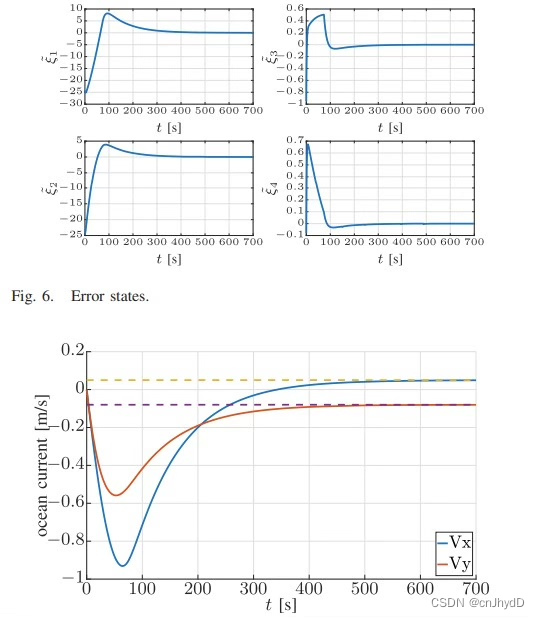
除了以上提到的应用领域,事件触发控制还可以应用于网络控制系统(NSS)和分布式模型预测控制(MPC)。例如,网络控制系统事件触发控制器通过设置事件触发条件来控制网络控制系统的通信和控制,提高系统的实时性和鲁棒性。在基于车辆编队感知传输调度的事件触发分布式MPC控制中,事件触发控制可以帮助控制器在车辆编队中实时进行通信和控制,从而提高编队控制系统的性能和稳定性。
综上所述,事件触发控制作为一种重要的控制策略,在深度强化学习自动驾驶决策、多智能体分布式系统和网络控制系统中有着广泛的应用。通过设置事件触发条件,事件触发控制可以减少通信和决策次数,提高系统的效率和性能。未来,随着技术的发展和应用场景的不断拓展,事件触发控制将在更多领域展现出其优势和潜力。
相关代码,程序地址:http://imgcs.cn/lanzoun/747436886877.html


















 1014
1014

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









