







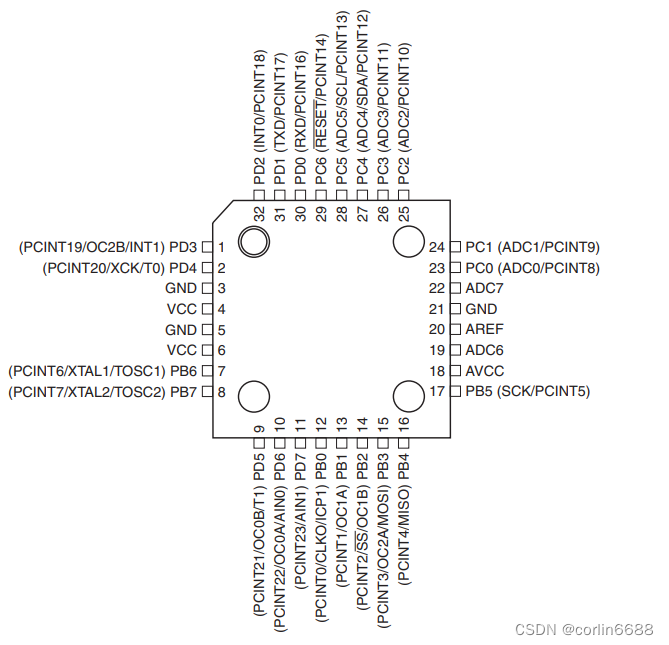
一、Atmega328p是一款基于RISC的高性能、低功耗的8位MCU。具有32KB ISP闪存存储器、1KB EEPROM、2KB SRAM,23个通用GPIO,1个USART、1个IIC、1个SPI等接口。工作电压1.8V~5.5V。封装为TQFP-32。引脚定义如下:
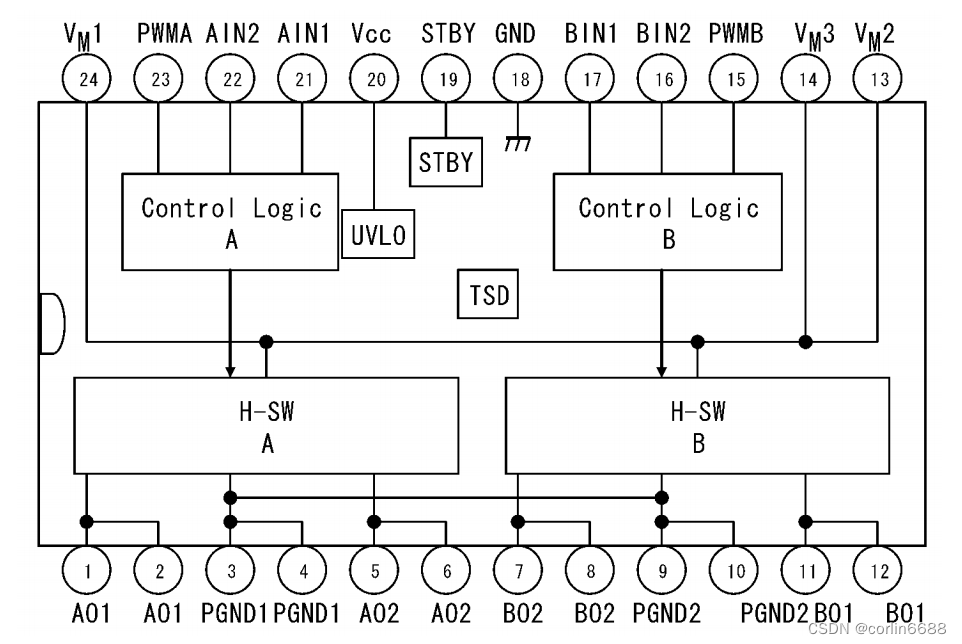
二、 TB6612FNG是一款直流电机驱动IC。具有大电流MOSFET-H桥结构,双通道电路输出,可同时驱动2个直流电机。输出电流为1.2A(峰值3.2A)。4种电机控制模式:正转、反转、制动、停止。PWM支持频率高达100KHz。具有低压检测和热停机保护功能。工作温度范围:-20~85°C。封装为SSOP-24。引脚定义如下:
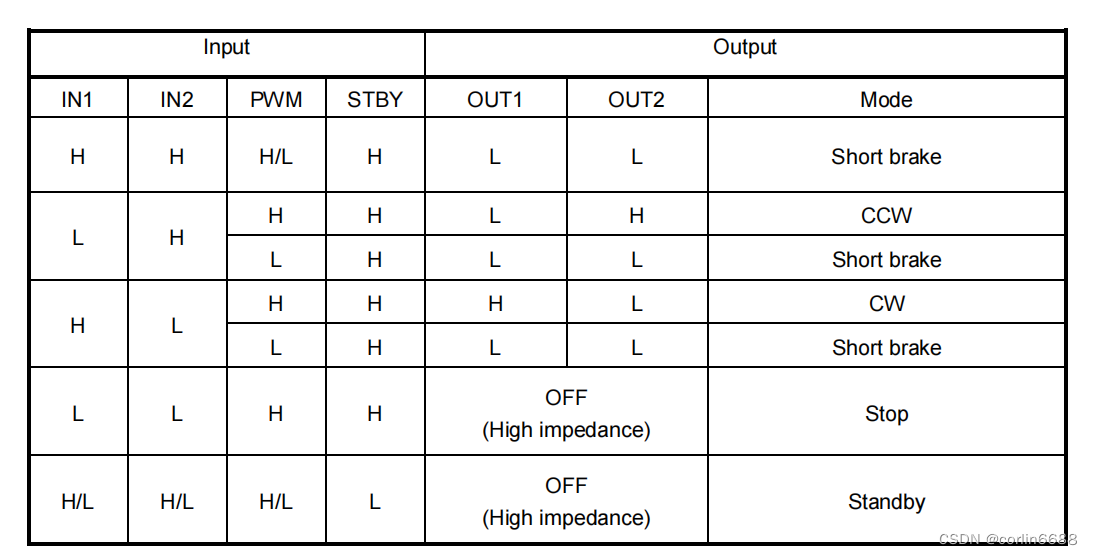
控制模式配置如下:
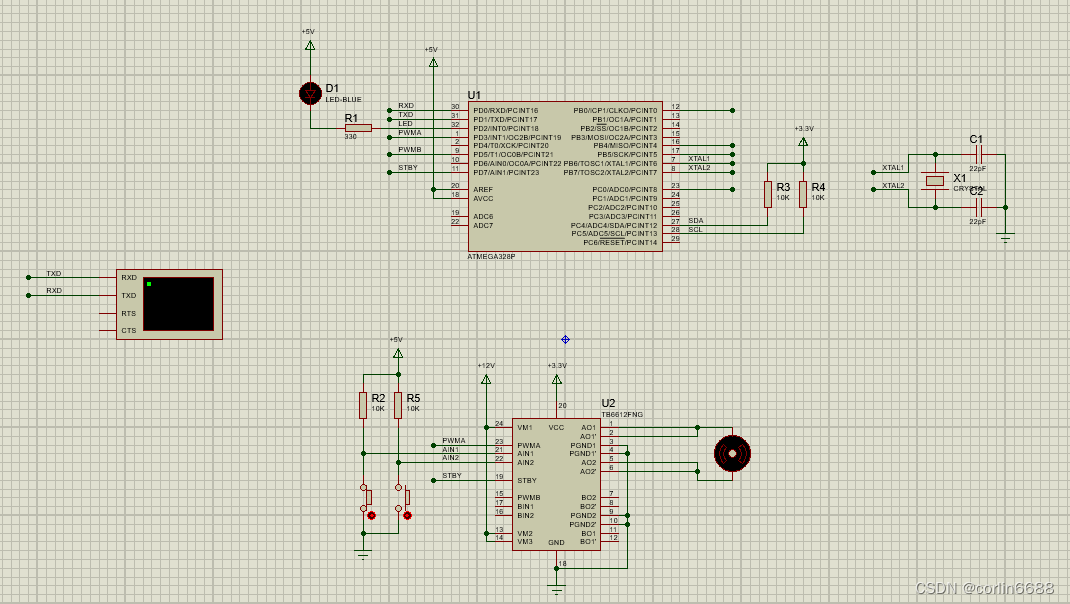
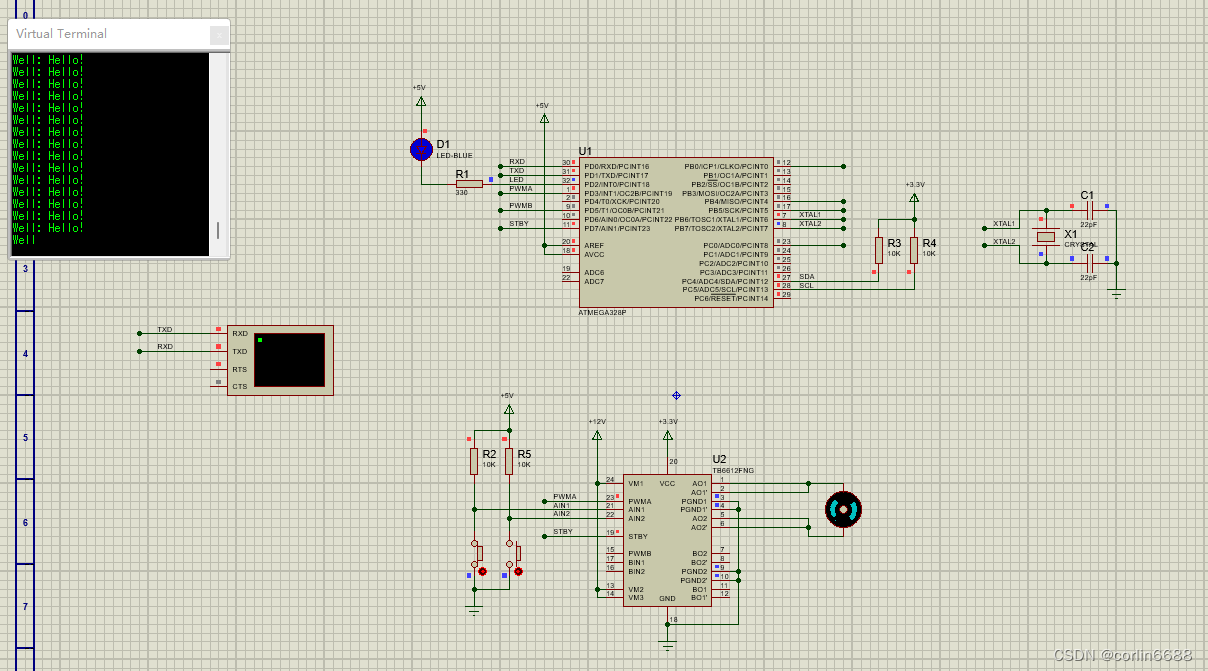
三、proteus仿真原理图:
四、仿真效果图:
















 2431
2431











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











