







 本文介绍了两种常见的寻径算法,A*和Dijkstra。A*算法是求解最短路径的有效方法,其核心是估价函数f(n)=g(n)+h(n),在Java中实现A*算法包括路径评估和路径查询两个步骤。文中提供了Node和PathFinder类的Java代码实现,用于路径寻径。
本文介绍了两种常见的寻径算法,A*和Dijkstra。A*算法是求解最短路径的有效方法,其核心是估价函数f(n)=g(n)+h(n),在Java中实现A*算法包括路径评估和路径查询两个步骤。文中提供了Node和PathFinder类的Java代码实现,用于路径寻径。
据我个人所知,目前流行的寻径方法大体有两种,即A* 和Dijkstra(SP算法)
Dijkstra算法:
由Edsger Wybe Dijkstra先生发明(已故)
Dijkstra算法是典型的最短路算法,用于计算一个节点到其他所有节点的最短路径。主要特点是以起始点为中心向外层层扩展,直到扩展到终点为止。Dijkstra算法能得出最短路径的最优解,但由于它遍历计算的节点很多,所以效率低。Dijkstra算法是一种逐步搜索算法,通过为每个顶点n保留目前为止所找到的从m到n的最短路径来工作的。
搜索过程:
假如在第m步搜索到一个最短路径,而该路径上有n个距离源节点最近的节点,则将他们认为是一个节点集合N;在第m+1步,搜索不属于N的距离源节点最近的节点,并搜索到的节点加入到N中;继续搜索,直至到达目的节点,N中的节点集合便是从源节点到目的节点的最短路径。
算法描述:
Dijkstra算法是通过为每个顶点v保留目前为止所找到的从s到v的最短路径来工作的。初始时,源点s的路径长度值被赋为0(d[s]=0), 同时把所有其他顶点的路径长度设为无穷大,即表示我们不知道任何通向这些顶点的路径(对于V中所有顶点v除s外d[v]= ∞)。当算法结束时,d[v]中储存的便是从s到v的最短路径,或者如果路径不存在的话是无穷大。 Dijstra算法的基础操作是边的拓展:如果存在一条从u到v的边,那么从s到u的最短路径可以通过将边(u,v)添加到尾部来拓展一条从s到v的路径。这条路径的长度是d[u]+w(u,v)。如果这个值比目前已知的d[v]的值要小,我们可以用新值来替代当前d[v]中的值。拓展边的操作一直执行到所有的d[v]都代表从s到v最短路径的花费。这个算法经过组织因而当d[u]达到它最终的值的时候没条边(u,v)都只被拓展一次。算法维护两个顶点集S和Q。集合S保留了我们已知的所有d[v]的值已经是最短路径的值顶点,而集合Q则保留其他所有顶点。集合S 初始状态为空,而后每一步都有一个顶点从Q移动到S。这个被选择的顶点是Q中拥有最小的d[u]值的顶点。当一个顶点u从Q中转移到了S中,算法对每条外接边(u,v)进行拓展。
A*(A Star)算法:
A*(A-Star)算法是一种静态路网中求解最短路最有效的方法。
公式表示为:f(n)=g(n)+h(n), 其中f(n) 是节点n从初始点到目标点的估价函数,g(n) 是在状态空间中从初始节点到n节点的实际代价,h(n)是从n到目标节点最佳路径的估计代价。
搜索过程:
创建两个表,OPEN表保存所有已生成而未考察的节点,CLOSED表中记录已访问过的节点。遍历当前节点的各个节点,将n节点放入CLOSE中,取n节点的子节点X,->算X的估价值.
While(OPEN!=NULL)
{
从OPEN表中取估价值f最小的节点n;
if(n节点==目标节点) break;
else
{
if(X in OPEN) 比较两个X的估价值f //注意是同一个节点的两个不同路径的估价值
if( X的估价值小于OPEN表的估价值 )
更新OPEN表中的估价值; //取最小路径的估价值
if(X in CLOSE) 比较两个X的估价值 //注意是同一个节点的两个不同路径的估价值
if( X的估价值小于CLOSE表的估价值 )
更新CLOSE表中的估价值; 把X节点放入OPEN //取最小路径的估价值
if(X not in both)
求X的估价值;
并将X插入OPEN表中; //还没有排序
}
将n节点插入CLOSE表中;
按照估价值将OPEN表中的节点排序; //实际上是比较OPEN表内节点f的大小,从最小路径的节点向下进行。
}
就实际应用而言,A*算法和Dijistra算法的最大区别就在于有无估价值,本质上Dijistra算法相当于A*算法中估价值为0的情况。所以此次我选取A*算法进行Java实现。
抛开理论性的数学概念,通常的A*算法,其实只有两个步骤,一是路径评估,以保证移动的下一个位置离目标最近,评估的结果越精确则寻径的效率也将越高。二是路径查询,也即将评估结果进行反应,而后从新位置再次进行评估指导无路可走为止,以此遍历出可行的路径。
在A*算法的程序实现中,本质上我们只需要关心三点,即起点、终点和地图信息,有了这三项基本数据,我们就可以构建任何情况下的A*实现。
下面我现在提供的是一个A*的Java静态寻径算法实现,逻辑见代码注释。
运行效果如下图(1,1 to 10,13):
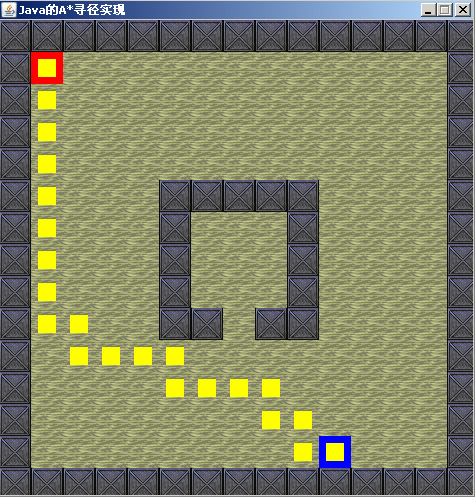
(1,1 to 7,9 小房子门口中间)

(1,1 to 6,7 小房子内部)
Node.java
 package
org.test.astar;
package
org.test.astar;
import
java.awt.Point;
import
java.util.LinkedList;
 /**
/**
 * <p>
* <p>
* Title: LoonFramework
* </p>
* <p>
* Description:描述路径节点用类
* </p>
* <p>
* Copyright: Copyright (c) 2008
* </p>
* <p>
* Company: LoonFramework
* </p>
* <p>
* License: http://www.apache.org/licenses/LICENSE-2.0
* </p>
*
* @author chenpeng
* @email:ceponline@yahoo.com.cn
* @version 0.1
 */
*/
public
class
Node
implements
Comparable
{
// 坐标
public Point _pos;
// 开始地点数值
public int _costFromStart;
// 目标地点数值
public int _costToObject;
// 父节点
public Node _parentNode;
 private Node() {
private Node() {
 }
}
/**
* 以注入坐标点方式初始化Node
*
* @param _pos
*/
public Node(Point _pos) {
this._pos = _pos;
}
/**
* 返回路径成本
*
* @param node
* @return
*/
public int getCost(Node node) {
// 获得坐标点间差值 公式:(x1, y1)-(x2, y2)
int m = node._pos.x - _pos.x;
int n = node._pos.y - _pos.y;
// 取两节点间欧几理德距离(直线距离)做为估价值,用以获得成本
return (int) Math.sqrt(m * m + n * n);
}
/**
* 检查node对象是否和验证对象一致
*/
public boolean equals(Object node) {
// 验证坐标为判断依据
if (_pos.x == ((Node) node)._pos.x && _pos.y == ((Node) node)._pos.y) {
return true;
}
return false;
}
/**
* 比较两点以获得最小成本对象
*/
public int compareTo(Object node) {
int a1 = _costFromStart + _costToObject;
int a2 = ((Node) node)._costFromStart + ((Node) node)._costToObject;
if (a1 < a2) {
return -1;
} else if (a1 == a2) {
return 0;
} else {
return 1;
}
}
/**
* 获得上下左右各点间移动限制区域
*
* @return
*/
public LinkedList getLimit() {
LinkedList limit = new LinkedList();
int x = _pos.x;
int y = _pos.y;
// 上下左右各点间移动区域(对于斜视地图,可以开启注释的偏移部分,此时将评估8个方位)
// 上
limit.add(new Node(new Point(x, y - 1)));
// 右上
// limit.add(new Node(new Point(x+1, y-1)));
// 右
Dijkstra算法:
由Edsger Wybe Dijkstra先生发明(已故)
Dijkstra算法是典型的最短路算法,用于计算一个节点到其他所有节点的最短路径。主要特点是以起始点为中心向外层层扩展,直到扩展到终点为止。Dijkstra算法能得出最短路径的最优解,但由于它遍历计算的节点很多,所以效率低。Dijkstra算法是一种逐步搜索算法,通过为每个顶点n保留目前为止所找到的从m到n的最短路径来工作的。
搜索过程:
假如在第m步搜索到一个最短路径,而该路径上有n个距离源节点最近的节点,则将他们认为是一个节点集合N;在第m+1步,搜索不属于N的距离源节点最近的节点,并搜索到的节点加入到N中;继续搜索,直至到达目的节点,N中的节点集合便是从源节点到目的节点的最短路径。
算法描述:
Dijkstra算法是通过为每个顶点v保留目前为止所找到的从s到v的最短路径来工作的。初始时,源点s的路径长度值被赋为0(d[s]=0), 同时把所有其他顶点的路径长度设为无穷大,即表示我们不知道任何通向这些顶点的路径(对于V中所有顶点v除s外d[v]= ∞)。当算法结束时,d[v]中储存的便是从s到v的最短路径,或者如果路径不存在的话是无穷大。 Dijstra算法的基础操作是边的拓展:如果存在一条从u到v的边,那么从s到u的最短路径可以通过将边(u,v)添加到尾部来拓展一条从s到v的路径。这条路径的长度是d[u]+w(u,v)。如果这个值比目前已知的d[v]的值要小,我们可以用新值来替代当前d[v]中的值。拓展边的操作一直执行到所有的d[v]都代表从s到v最短路径的花费。这个算法经过组织因而当d[u]达到它最终的值的时候没条边(u,v)都只被拓展一次。算法维护两个顶点集S和Q。集合S保留了我们已知的所有d[v]的值已经是最短路径的值顶点,而集合Q则保留其他所有顶点。集合S 初始状态为空,而后每一步都有一个顶点从Q移动到S。这个被选择的顶点是Q中拥有最小的d[u]值的顶点。当一个顶点u从Q中转移到了S中,算法对每条外接边(u,v)进行拓展。
A*(A Star)算法:
A*(A-Star)算法是一种静态路网中求解最短路最有效的方法。
公式表示为:f(n)=g(n)+h(n), 其中f(n) 是节点n从初始点到目标点的估价函数,g(n) 是在状态空间中从初始节点到n节点的实际代价,h(n)是从n到目标节点最佳路径的估计代价。
搜索过程:
创建两个表,OPEN表保存所有已生成而未考察的节点,CLOSED表中记录已访问过的节点。遍历当前节点的各个节点,将n节点放入CLOSE中,取n节点的子节点X,->算X的估价值.
While(OPEN!=NULL)
{
从OPEN表中取估价值f最小的节点n;
if(n节点==目标节点) break;
else
{
if(X in OPEN) 比较两个X的估价值f //注意是同一个节点的两个不同路径的估价值
if( X的估价值小于OPEN表的估价值 )
更新OPEN表中的估价值; //取最小路径的估价值
if(X in CLOSE) 比较两个X的估价值 //注意是同一个节点的两个不同路径的估价值
if( X的估价值小于CLOSE表的估价值 )
更新CLOSE表中的估价值; 把X节点放入OPEN //取最小路径的估价值
if(X not in both)
求X的估价值;
并将X插入OPEN表中; //还没有排序
}
将n节点插入CLOSE表中;
按照估价值将OPEN表中的节点排序; //实际上是比较OPEN表内节点f的大小,从最小路径的节点向下进行。
}
就实际应用而言,A*算法和Dijistra算法的最大区别就在于有无估价值,本质上Dijistra算法相当于A*算法中估价值为0的情况。所以此次我选取A*算法进行Java实现。
抛开理论性的数学概念,通常的A*算法,其实只有两个步骤,一是路径评估,以保证移动的下一个位置离目标最近,评估的结果越精确则寻径的效率也将越高。二是路径查询,也即将评估结果进行反应,而后从新位置再次进行评估指导无路可走为止,以此遍历出可行的路径。
在A*算法的程序实现中,本质上我们只需要关心三点,即起点、终点和地图信息,有了这三项基本数据,我们就可以构建任何情况下的A*实现。
下面我现在提供的是一个A*的Java静态寻径算法实现,逻辑见代码注释。
运行效果如下图(1,1 to 10,13):
(1,1 to 7,9 小房子门口中间)
(1,1 to 6,7 小房子内部)
Node.java
package
org.test.astar;
import
java.awt.Point;
import
java.util.LinkedList;
/** * <p> * Title: LoonFramework * </p> * <p> * Description:描述路径节点用类 * </p> * <p> * Copyright: Copyright (c) 2008 * </p> * <p> * Company: LoonFramework * </p> * <p> * License: http://www.apache.org/licenses/LICENSE-2.0 * </p> * * @author chenpeng * @email:ceponline@yahoo.com.cn * @version 0.1 */
public
class
Node
implements
Comparable
{
// 坐标 public Point _pos; // 开始地点数值 public int _costFromStart; // 目标地点数值 public int _costToObject; // 父节点 public Node _parentNode; private Node() {
* <p> * Title: LoonFramework * </p> * <p> * Description:描述路径节点用类 * </p> * <p> * Copyright: Copyright (c) 2008 * </p> * <p> * Company: LoonFramework * </p> * <p> * License: http://www.apache.org/licenses/LICENSE-2.0 * </p> * * @author chenpeng * @email:ceponline@yahoo.com.cn * @version 0.1 */
public
class
Node
implements
Comparable
{
// 坐标 public Point _pos; // 开始地点数值 public int _costFromStart; // 目标地点数值 public int _costToObject; // 父节点 public Node _parentNode; private Node() {
 } /** * 以注入坐标点方式初始化Node * * @param _pos */ public Node(Point _pos) {
this._pos = _pos; } /** * 返回路径成本 * * @param node * @return */ public int getCost(Node node) {
// 获得坐标点间差值 公式:(x1, y1)-(x2, y2) int m = node._pos.x - _pos.x; int n = node._pos.y - _pos.y; // 取两节点间欧几理德距离(直线距离)做为估价值,用以获得成本 return (int) Math.sqrt(m * m + n * n); } /** * 检查node对象是否和验证对象一致 */ public boolean equals(Object node) {
// 验证坐标为判断依据 if (_pos.x == ((Node) node)._pos.x && _pos.y == ((Node) node)._pos.y) {
return true; } return false; } /** * 比较两点以获得最小成本对象 */ public int compareTo(Object node) {
int a1 = _costFromStart + _costToObject; int a2 = ((Node) node)._costFromStart + ((Node) node)._costToObject; if (a1 < a2) {
return -1; } else if (a1 == a2) {
return 0; } else {
return 1; } } /** * 获得上下左右各点间移动限制区域 * * @return */ public LinkedList getLimit() {
LinkedList limit = new LinkedList(); int x = _pos.x; int y = _pos.y; // 上下左右各点间移动区域(对于斜视地图,可以开启注释的偏移部分,此时将评估8个方位) // 上 limit.add(new Node(new Point(x, y - 1))); // 右上 // limit.add(new Node(new Point(x+1, y-1))); // 右
} /** * 以注入坐标点方式初始化Node * * @param _pos */ public Node(Point _pos) {
this._pos = _pos; } /** * 返回路径成本 * * @param node * @return */ public int getCost(Node node) {
// 获得坐标点间差值 公式:(x1, y1)-(x2, y2) int m = node._pos.x - _pos.x; int n = node._pos.y - _pos.y; // 取两节点间欧几理德距离(直线距离)做为估价值,用以获得成本 return (int) Math.sqrt(m * m + n * n); } /** * 检查node对象是否和验证对象一致 */ public boolean equals(Object node) {
// 验证坐标为判断依据 if (_pos.x == ((Node) node)._pos.x && _pos.y == ((Node) node)._pos.y) {
return true; } return false; } /** * 比较两点以获得最小成本对象 */ public int compareTo(Object node) {
int a1 = _costFromStart + _costToObject; int a2 = ((Node) node)._costFromStart + ((Node) node)._costToObject; if (a1 < a2) {
return -1; } else if (a1 == a2) {
return 0; } else {
return 1; } } /** * 获得上下左右各点间移动限制区域 * * @return */ public LinkedList getLimit() {
LinkedList limit = new LinkedList(); int x = _pos.x; int y = _pos.y; // 上下左右各点间移动区域(对于斜视地图,可以开启注释的偏移部分,此时将评估8个方位) // 上 limit.add(new Node(new Point(x, y - 1))); // 右上 // limit.add(new Node(new Point(x+1, y-1))); // 右 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 7454
7454

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









