









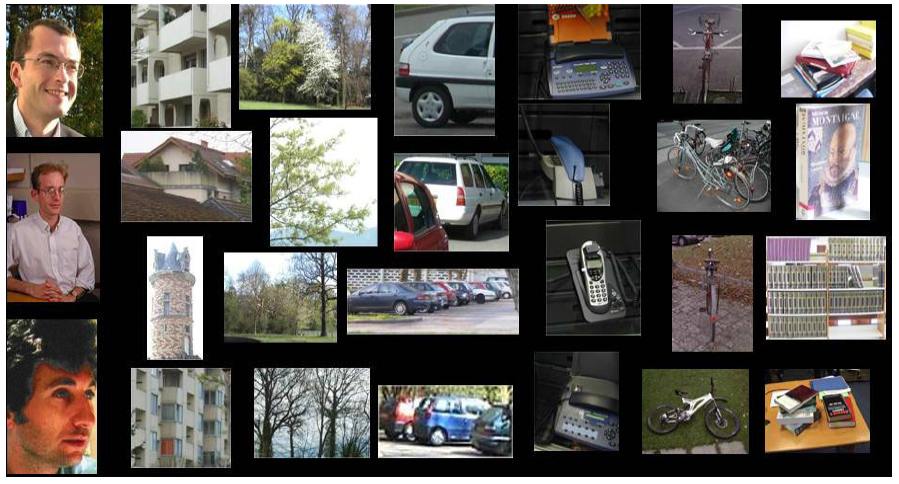
‘Selective Search for Object Recognition” 文章中特征描述使用了BOW,找到这篇文章看了一下,主要是提取BOK来做广义的目标归类,分类器使用的是朴素贝叶斯和SVM,实验对七类广义目标进行归类,目标姿态不一,背景复杂,跟我们之前接触的纯目标分类有所不同,有人脸,建筑物,汽车等,如下图所示:
特征使用的是BOK,统计图像中特定模式出现次数的直方图,这里的K是keypoints,即聚类中心。在文中,作者指出了视觉归类与之前概念的区分:
识别:需要将不同的杯子区分,而归类是将所有的杯子归为一类;
基于上下文的图像检索:给定图像或底层特征,基于底层特征检索图像;
检测:分析某一视觉类是否存在于给定图像中
视觉场景归类流程如下:
1)检测及描述图像块;
2)将块特征描述分配给clusters,词典应当尽量大;
3)建立BOK,计算分配给每个clusters的块的数目
4)将BOK作为特征,使用多类分类器进行分类
方法描述:
A. 特征提取
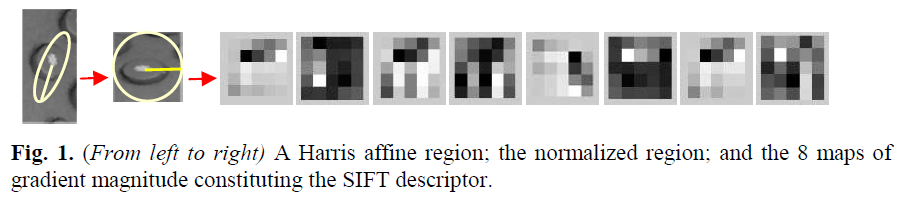
局部特征对只有局部可视或被遮挡的物体识别鲁棒,作者使用的是Harris Affine检测器,对尺度和仿射变换鲁棒,Harris角点检测时一个迭代的过程,感兴趣点是尺度Harris函数的局部极大值及Laplacian算子尺度上的极值,之后确定一个椭圆邻域,大小由尺度决定,形状有图像二阶矩矩阵特征值决定。
仿射区域之后映射到一个圆形区域,之后在该区域中计算SITF特征,下图为特征描述的流程及SIFT特征的8个梯度幅值图:
B. 构建视觉词典
聚类算法主要基于迭代平方误差分割,作者使用的k-means,通过迭代将点分配到最近的聚类中并更新聚类中心,通过设置不同的k值和不同的初始化方法得到具有最小经验风险的类蔟。
文章缺少构建cluster后如何构建词袋的具体描述,流程参见另外一篇博文的描述:http://blog.csdn.net/v_JULY_v/article/details/6555899
C. 归类
使用的是朴素贝叶斯分类器和SVM。
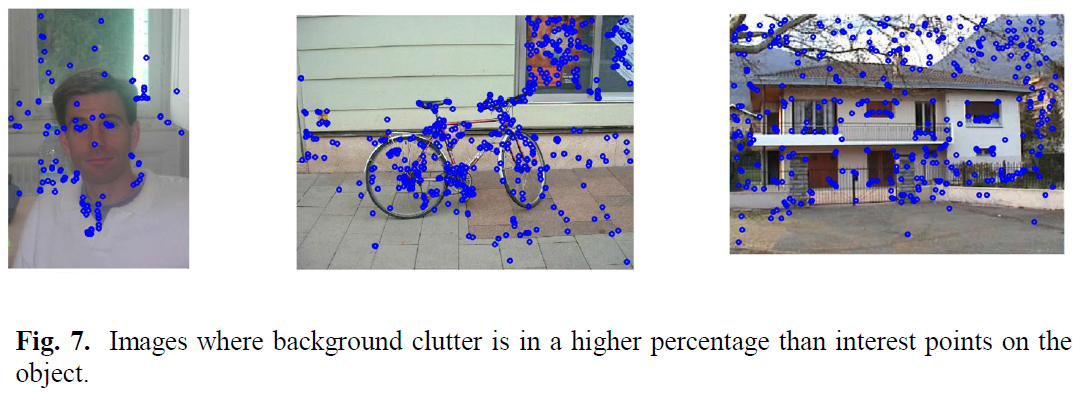
实验结果
有一个比较有意思,大部分感兴趣点在背景上被正确识别出的场景:















 4513
4513

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









