







 该博客介绍了如何使用线性代数判断空间中一点是否位于任意角度的长方体内,通过判断点与三个法线的夹角余弦值符号来实现。文中详细解释了数学原理,包括三个不共线点确定平面的方程,以及如何用超过三个点拟合平面,并提供了代码实现。
该博客介绍了如何使用线性代数判断空间中一点是否位于任意角度的长方体内,通过判断点与三个法线的夹角余弦值符号来实现。文中详细解释了数学原理,包括三个不共线点确定平面的方程,以及如何用超过三个点拟合平面,并提供了代码实现。
几何解释
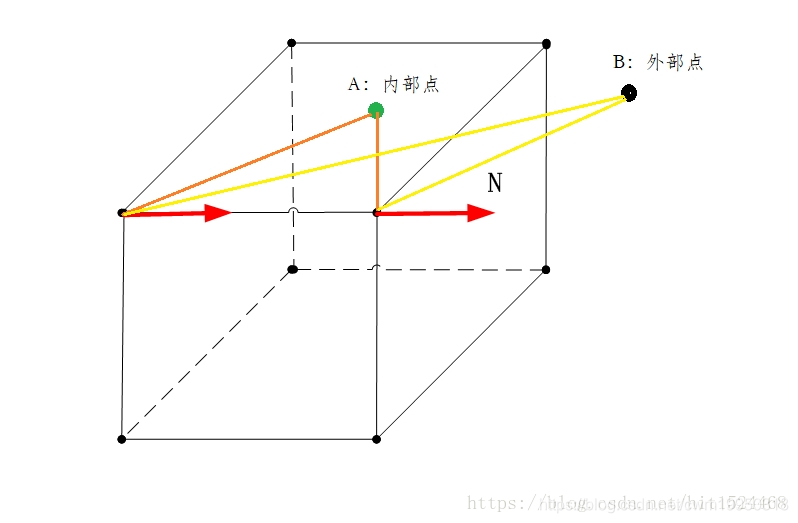
如下图所示,我们其实只需要判断一个点是否在3组平行平面的同一侧即可以判断(前/后面,左/右面,上/下面),判断的方法比较简单:即利用如图所示中的与法线的夹角,当一个点(如图中点B)在左右面的同一侧时,与法线的夹角都是锐角或钝角;当一个点(如图中点A)在左右面的不同侧时,与法线的夹角必定一个为锐角一个为钝角;实际上,我们不需要判断角度,我们只需要判断余弦值的符号即可,即可以判断向量的内积的符号即可。
判断点是否在两个平行面的同一侧 <=> 判断点与法线的夹角的大小 <=> 判断余弦值的符号 <=> 判断向量内积的符号
引用自:判断点是否包含在任意姿态长方体内部
数学工具
平面方程的一般形式为:
A x + B y + C z + D = 0 Ax+By+Cz+D=0 Ax+By+Cz+D=0
假设 D ≠ 0 D\neq0 D=0,将 D D D移至 = = =右边,所有系数除以 D D D,并乘以 − 1 -1 −1,公式可写为:
A x + B y + C z = 1 Ax+By+Cz=1 Ax+By+Cz=1
三个不共线的点确定一个平面
假设已知不共线三点: ( x 1 , y 1 , z 1 ) , ( x 2 , y 2 , z 2 ) , ( x 3 , y 3 , z 3 ) (x_{1},y_{1},z_{1}),(x_{2},y_{2},z_{2}),(x_{3},y_{3},z_{3}) (x1,y1,z1),(x2,y2,z2),(x3,y3,z3),可列出一组三元一次方程:
A x 1 + B y 1 + C z 1 = 1 A x 2 + B y 2 + C z 2 = 1 A x 3 + B y 3 + C z 3 = 1 Ax_{1}+By_{1}+Cz_{1}=1\newline Ax_{2}+By_{2}+Cz_{2}=1\newline Ax_{3}+By_{3}+Cz_{3}=1 Ax1+By1+Cz1=1Ax2+By2+
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 7021
7021

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









