可以使用向量叉积的方法判断线段与长方体是否相交。
具体思路如下:
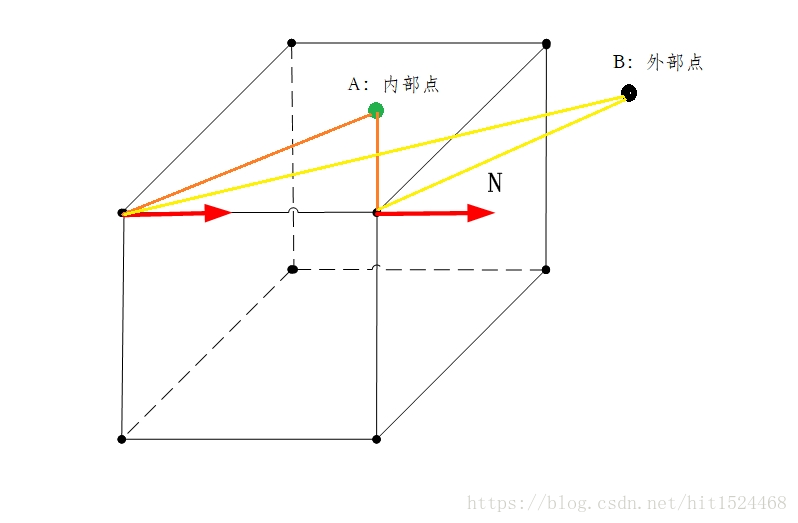
1. 将长方体分解为每个面,并计算每个面的法向量。
2. 将线段表示为起点和方向向量。
3. 判断线段是否与长方体的六个面相交。对于每个面,计算线段起点到该面的距离,并计算线段在该面法向量上的投影长度,判断这个投影长度是否在线段的范围内。若线段与任意一个面相交,则判断线段与长方体相交。
4. 若线段与所有面都没有相交,则判断线段是否在长方体内部。将线段起点代入长方体六个面的方程中,若线段起点在长方体六个面的同一侧,则线段在长方体内部。
代码实现如下:
```c++
#include <iostream>
#include <cmath>
using namespace std;
const double eps = 1e-8; // 精度
struct Point {
double x, y, z;
};
struct Vector {
double x, y, z;
Vector operator+(const Vector& v) const {
return { x + v.x, y + v.y, z + v.z };
}
Vector operator-(const Vector& v) const {
return { x - v.x, y - v.y, z - v.z };
}
Vector operator*(double k) const {
return { x * k, y * k, z * k };
}
double operator*(const Vector& v) const { // 点积
return x * v.x + y * v.y + z * v.z;
}
Vector operator^(const Vector& v) const { // 叉积
return { y * v.z - z * v.y, z * v.x - x * v.z, x * v.y - y * v.x };
}
double len() const { // 向量长度
return sqrt(x * x + y * y + z * z);
}
void normalize() { // 归一化
double l = len();
x /= l;
y /= l;
z /= l;
}
};
struct Line {
Point p;
Vector v;
};
struct Face {
Vector n; // 法向量
double d; // 到原点的距离
};
struct Cube {
Face face[6]; // 长方体的六个面
};
// 计算两个点之间的距离
double dist(const Point& a, const Point& b) {
return sqrt((a.x - b.x) * (a.x - b.x) + (a.y - b.y) * (a.y - b.y) + (a.z - b.z) * (a.z - b.z));
}
// 计算点到直线的距离
double dist(const Line& l, const Point& p) {
return ((p - l.p) ^ l.v).len() / l.v.len();
}
// 计算点到面的距离
double dist(const Face& f, const Point& p) {
return abs(f.n * p - f.d) / f.n.len();
}
// 计算线段与面的交点
Point intersect(const Line& l, const Face& f) {
double t = (f.d - f.n * l.p) / (f.n * l.v);
return { l.p.x + l.v.x * t, l.p.y + l.v.y * t, l.p.z + l.v.z * t };
}
// 判断线段是否在长方体内部
bool inside(const Cube& c, const Line& l) {
int cnt1 = 0, cnt2 = 0;
for (int i = 0; i < 6; i++) {
double d1 = dist(c.face[i], l.p);
double d2 = dist(c.face[i], l.p + l.v);
if (d1 < eps && d2 < eps)
return true;
if (d1 < eps)
cnt1++;
if (d2 < eps)
cnt2++;
}
if (cnt1 == 6 || cnt2 == 6)
return true;
return cnt1 > 0 && cnt2 > 0;
}
// 判断线段是否与长方体相交
bool intersect(const Cube& c, const Line& l) {
for (int i = 0; i < 6; i++) {
double d1 = dist(c.face[i], l.p);
double d2 = dist(c.face[i], l.p + l.v);
if (d1 * d2 < eps || (d1 < eps && d2 - dist(l, intersect(l, c.face[i])) < eps))
return true;
}
return false;
}
int main() {
Point p1 = { 0, 0, 0 };
Point p2 = { 1, 1, 1 };
Line l = { { -1, 0.5, 0.5 }, { 1, 0, 0 } };
Cube c = {
{ { 1, 0, 0 }, p2.x }, // x = p2.x
{ { -1, 0, 0 }, -p1.x }, // x = p1.x
{ { 0, 1, 0 }, p2.y }, // y = p2.y
{ { 0, -1, 0 }, -p1.y }, // y = p1.y
{ { 0, 0, 1 }, p2.z }, // z = p2.z
{ { 0, 0, -1 }, -p1.z } // z = p1.z
};
if (intersect(c, l))
cout << "intersect" << endl;
else if (inside(c, l))
cout << "inside" << endl;
else
cout << "outside" << endl;
return 0;
}
```

























 819
819

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









