






ros2 topic 编程之测试 DDS 的 QoS
1 前言与资料
在ROS2高效学习第一章 – ros2整体介绍及DDS引入中,我们系统介绍了 ros2 引入 DDS(Data Distribution Service,数据分发服务)的前因后果。作为 ros2 topic 编程第三篇,本文仍将复用第一篇ROS2高效学习第四章 – ros2 topic 编程之收发 string 并使用 ros2 launch创建的两个软件包,即 pubsub_cpp 和 pubsub_py,在此基础上开发 QoS(Quality of Service,服务质量) 样例,实际测试 ros2 DDS 的功能。
本文参考资料如下:
(1)ROS2高效学习第一章 – ros2整体介绍及DDS引入
(2)古月 ros2 DDS
2 正文
2.1 DDS QoS 引入
(1)QoS 含义:Quality of Service,服务质量,这是通信领域一个非常重要的概念,用于控制发布者和订阅者之间的通信策略。只看他的名字很难直接理解他的含义,但可以把 QoS 映射为几个对应的配置进行直观理解。请执行下面的命令,查看 QoS 默认配置。
# 随便发一个 topic
ros2 topic pub /chatter std_msgs/msg/Int32 "data: 42"
# 新开一个窗口,查看这个 topic 的默认 QoS profile
ros2 topic info /chatter --verbose
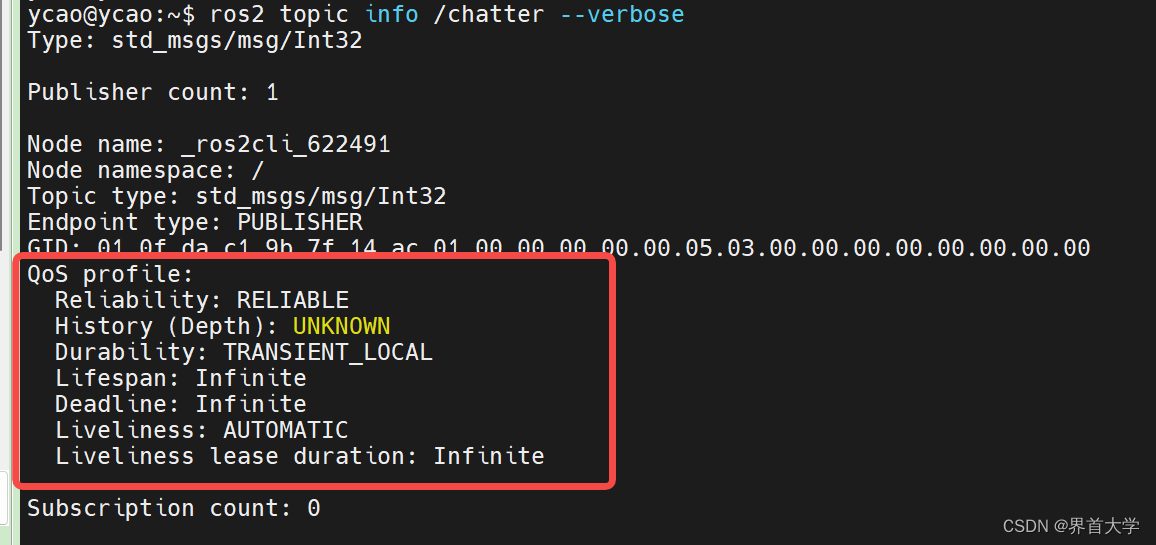
(2)QoS 配置逐项解析:
Reliability:消息传达的可靠性;
RELIABLE(default): 保证传输所有消息,丢失的消息会重传,类似 TCP 。
BEST_EFFORT: 尽最大努力传送消息,但不保证交付,不会重传丢失的消息,类似 UDP。
补充:机器人系统中,传感器数据通常使用BEST_EFFORT,而参数更新需要RELIABLE可靠性。
History:消息的历史记录方式,当订阅者由于忙碌错过了消息,其仍能收到历史消息。这个参数只有在 Reliability 为 RELIABLE 时才有用。
KEEP_LAST(default): 缓冲区保留最后几条消息。
KEEP_ALL: 缓冲区保留所有传递过的消息。
Depth:与 History 搭配使用,当 History 为 KEEP_LAST 时,指定需要保留的消息个数,默认是10个;
Durability:消息是否应该在网络中持久化,以便新加入的订阅者也能接收。这个参数只有在 Reliability 为 RELIABLE 时才有用
TRANSIENT_LOCAL(default): 消息在发布者端持久化,新加入的订阅者可以接收到旧消息,接收个数由History和Depth决定。
VOLATILE: 消息不在节点之间持久化,新加入的订阅者接收不到旧消息。
Lifespan:消息应该在缓存中保留多长时间。如果超过这个时间,消息会被丢弃,即使还没有被任何订阅者接收,默认值是 Infinite。
提示:Lifespan 的设置要与 History 和 Depth 对应起来,两个配置遵循木桶原理,最短的起作用。
Deadline:确定消息应当被发布和接收的最大期限,超出后会执行特定的回调函数,默认值是 Infinite。这个参数一般用于实时系统。
举例:deadline=Duration(seconds=2, nanoseconds=0),
Liveliness: 节点如何通告自己的活动状态,用来确定节点是否还活着。一般用于分布式系统
AUTOMATIC(default): 节点自动报告其存活状态。
MANUAL_BY_TOPIC: 发布者需要手动报告其针对特定话题的存活状态。
Liveliness lease duration: 与 Liveliness 搭配使用,表示节点或话题必须在此期限内报告其存活状态,否则认为已经不活跃,默认值是 Infinite。
(3)发布者和订阅者 QoS 配置要求:针对 topic 配置 QoS ,一般要求同一个 topic 收发两端的 QoS 配置要一致,不然就会有奇奇怪怪的问题。
(4)命令行测试 QoS 的方法:ros2 topic 命令行有一组qos选项,可以手动测试 QoS 。
# 使用 best_effort 发送 /chatter
ros2 topic pub /chatter std_msgs/msg/Int32 "data: 42" --qos-reliability best_effort
# 使用 reliable 订阅 /chatter,这样是收不到的!
ros2 topic echo /chatter --qos-reliability reliable
# 使用 best_effort 订阅 /chatter,欧凯!
ros2 topic echo /chatter --qos-reliability best_effort

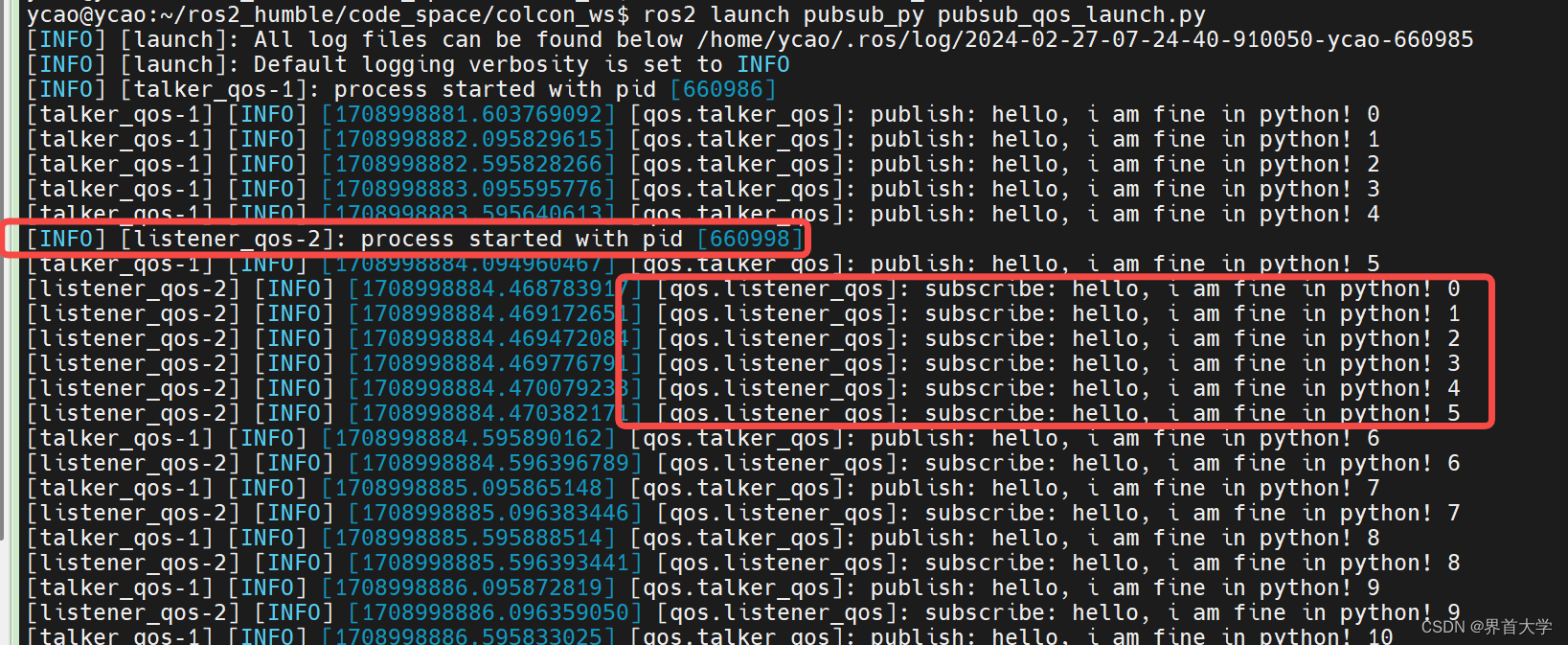
2.2 pubsub_py – 测试新加入的节点能收到历史消息
(1)创建新的 python 和 launch 文件
cd ~/colcon_ws/src/pubsub_py
touch launch/pubsub_qos_launch.py
touch pubsub_py/pub_hello_qos.py pubsub_py/sub_hello_qos.py
(2)编写 pub_hello_qos.py
#! /usr/bin/env python3
# -*- coding: utf-8 -*-
import rclpy
from rclpy.node import Node
from std_msgs.msg import String
from rclpy.qos import QoSProfile, QoSReliabilityPolicy, QoSHistoryPolicy, QoSDurabilityPolicy, LivelinessPolicy
from rclpy.duration import Duration
class Publisher(Node):
def __init__(self):
super().__init__('test_qos_publisher')
qos_profile = QoSProfile(
# RELIABLE(default), BEST_EFFORT
reliability = QoSReliabilityPolicy.RELIABLE,
# VOLATILE(default)
# TRANSIENT_LOCAL(Only works when reliability is RELIABLE and needs history:KEEP_LAST and depth)
# 新加入的节点能收到历史消息,这是最重要的配置!!!!!
durability=QoSDurabilityPolicy.TRANSIENT_LOCAL,
# history: only works when reliability is RELIABLE
# KEEP_LAST(default), KEEP_ALL
history = QoSHistoryPolicy.KEEP_LAST,
# default is 10
depth=10,
# default is Infinite
lifespan=Duration(seconds=5),
# default is Infinite
deadline=Duration(seconds=5, nanoseconds=0),
# AUTOMATIC(default), MANUAL_BY_TOPIC
liveliness=LivelinessPolicy.AUTOMATIC,
# default is Infinite
liveliness_lease_duration=Duration(seconds=5)
)
self._publisher = self.create_publisher(String, "hello_topic", qos_profile)
self._timer = self.create_timer(0.5, self.timer_callback)
self._i = 0
def timer_callback(self):
msg = String()
msg.data = "hello, i am fine in python! %d" % self._i
self._publisher.publish(msg)
self.get_logger().info("publish: %s" % msg.data)
self._i += 1
def main(args=None):
rclpy.init(args=args)
pub_node = Publisher()
rclpy.spin(pub_node)
pub_node.destroy_node()
rclpy.shutdown()
if __name__ == '__main__':
main()
(3)编写 sub_hello_qos.py
#! /usr/bin/env python3
# -*- coding: utf-8 -*-
import rclpy
from rclpy.node import Node
from std_msgs.msg import String
from rclpy.qos import QoSProfile, QoSReliabilityPolicy, QoSHistoryPolicy, QoSDurabilityPolicy, LivelinessPolicy
from rclpy.duration import Duration
from time import sleep
class Subscriber(Node):
def __init__(self):
super().__init__('test_qos_subscriber')
qos_profile = QoSProfile(
# RELIABLE(default), BEST_EFFORT
reliability = QoSReliabilityPolicy.RELIABLE,
# VOLATILE(default)
# TRANSIENT_LOCAL(Only works when reliability is RELIABLE and needs history:KEEP_LAST and depth)
# 新加入的节点能收到历史消息,这是最重要的配置!!!!!
durability=QoSDurabilityPolicy.TRANSIENT_LOCAL,
# history: only works when reliability is RELIABLE
# KEEP_LAST(default), KEEP_ALL
history = QoSHistoryPolicy.KEEP_LAST,
# default is 10
depth=10,
# default is Infinite
lifespan=Duration(seconds=5),
# default is Infinite
deadline=Duration(seconds=5, nanoseconds=0),
# AUTOMATIC(default), MANUAL_BY_TOPIC
liveliness=LivelinessPolicy.AUTOMATIC,
# default is Infinite
liveliness_lease_duration=Duration(seconds=5)
)
self._subscriber = self.create_subscription(String, "hello_topic", self.topic_callback, qos_profile)
def topic_callback(self, msg):
self.get_logger().info("subscribe: %s" % msg.data)
# sleep(2) # test qos history and depth parameters
def main(args=None):
rclpy.init(args=args)
sub_node = Subscriber()
rclpy.spin(sub_node)
sub_node.destroy_node()
rclpy.shutdown()
if __name__ == '__main__':
main()
(4)编写 pubsub_qos_launch.py
from launch import LaunchDescription
from launch_ros.actions import Node
from launch.actions import TimerAction
def generate_launch_description():
return LaunchDescription([
Node(
package='pubsub_py',
namespace='qos',
executable='talker_qos',
name='talker_qos'
),
TimerAction(
period=3.0, # test qos durability:TRANSIENT_LOCAL
# period=0.0,
actions=[
Node(
package='pubsub_py',
namespace='qos',
executable='listener_qos',
name='listener_qos'
)
]
)
])
(5)添加 setup.py
entry_points={
'console_scripts': [
'talker = pubsub_py.publisher:main',
'talker_diy = pubsub_py.pub_diy_msg:main',
'listener = pubsub_py.subscriber:main',
'listener_diy = pubsub_py.sub_diy_msg:main',
'talker_qos = pubsub_py.pub_hello_qos:main',
'listener_qos = pubsub_py.sub_hello_qos:main'
],
},
(6)编译并运行
~/colcon_ws
colcon build --packages-select diy_interface pubsub_py
source install/local_setup.bash
ros2 launch pubsub_py pubsub_qos_launch.py
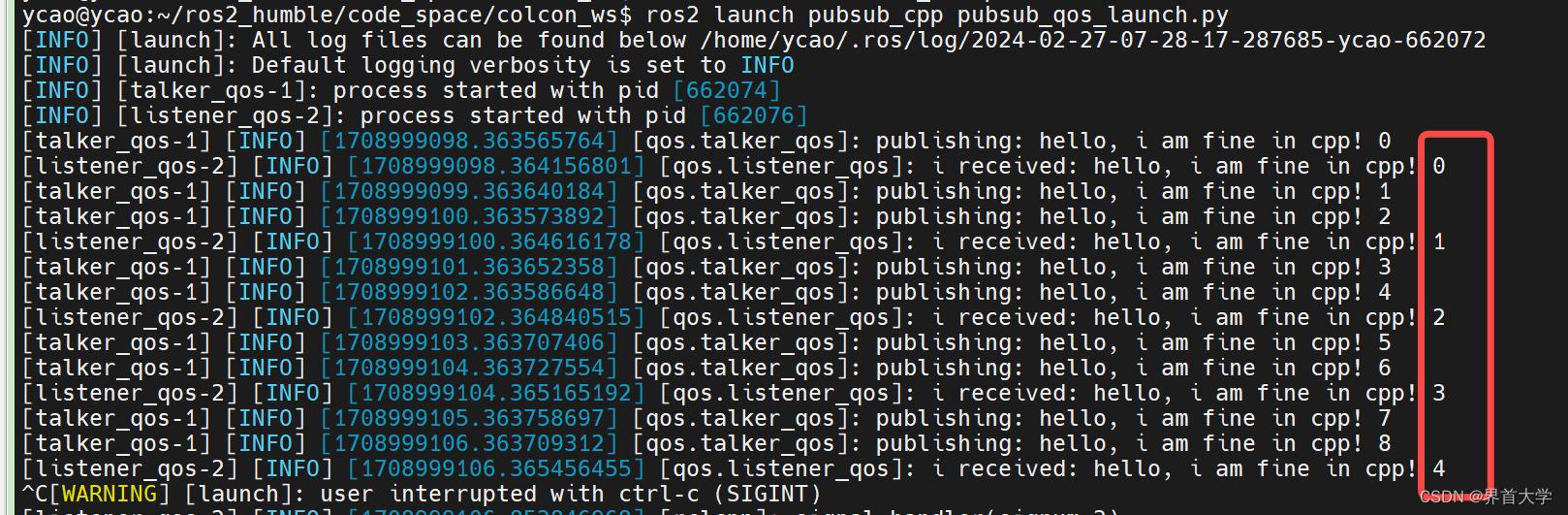
2.3 pubsub_cpp – 测试订阅者能接收错过的消息
代码链接:pubsub_cpp,这里不再详述,基本就是用 cpp 实现上面的 python 版本。不同的是,cpp 样例重点测试:订阅者因忙碌错过了一些消息,但通过 QoS 仍能接收。
3 总结
本文的代码托管在本人的github上:pubsub_py,pubsub_cpp















 950
950











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









