






相应仿真原件请移步资源下载

通常情况下,离网型逆变器采用的控制方法为电压电流双闭环控制,而常规的电压电流双闭环控制会存在电压跌落,频率失稳等情况,通俗的将就是没有电压和频率的支撑 。
下垂控制是现如今较为常用的李网逆变器的控制方法,其原理为采用P-f、Q-u来实现电压以及频率的支撑,即在电压外环之外又增加了有功频率环与无功电压环。
原理
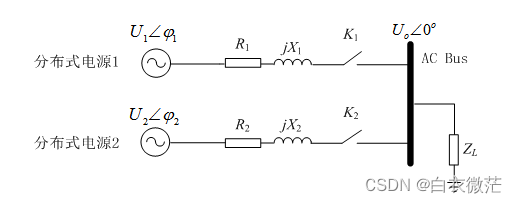
逆变器的输出阻抗和连接线路阻抗之和为系统等效阻抗,可表,
为负载阻抗。
进而可以得到逆变器输出电流表达式:
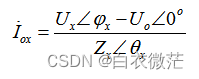
上式中,为逆变器x的输出电压的幅值,
为逆变器x相的输出电压的相角,
为交流母线电压,
为系统等效阻抗值,
为系统等效阻抗角。
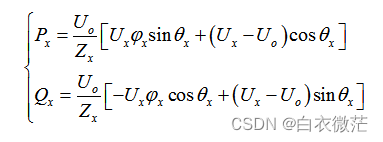
进而可以得到逆变器输出功率为:
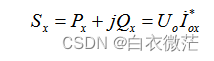
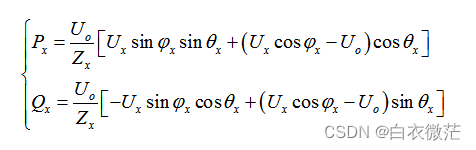
上式中,Px为逆变器x相输出的有功功率,Qx为逆变器x输出的无功功率。将上式两公式联立可得逆变器输出的有功功率Px和无功功率Qx为:
通常情况下的值极小,所以
进而可以得到系统的有功和无功功率表达式为:
从上式可以看出,逆变器输出的功率与其输出电压和交流母线电压两者之间的相位差以及幅值差都有关,因此通过控制逆变器输出电压的相位和幅值,就可以实现对逆变器输出有功功率和无功功率的控制。
由于相角与输出电压频率含有以下关系:
所以实际控制中往往通过控制逆变器输出电压的频率和幅值来控制其功率的输出。因此可以模拟同步发电机的特性,构建根据输出有功功率和无功功率控制逆变器输出电压的频率和幅值变化的近似线性耦合关系,来实现各并联逆变器间功率的合理分配,这就是下垂控制的基本原理。
下垂公式:


















 827
827

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









