







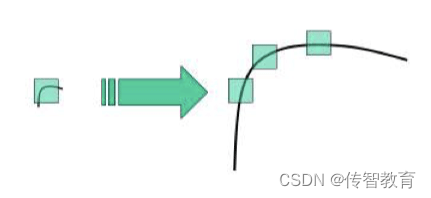
前面我们介绍了Harris和Shi-Tomasi角点检测算法,这两种算法具有旋转不变性,但不具有尺度不变性,以下图为例,在左侧小图中可以检测到角点,但是图像被放大后,在使用同样的窗口,就检测不到角点了。
所以,下面我们来介绍一种计算机视觉的算法,尺度不变特征转换即SIFT (Scale-invariant feature transform)。它用来侦测与描述影像中的局部性特征,它在空间尺度中寻找极值点,并提取出其位置、尺度、旋转不变量,此算法由 David Lowe在1999年所发表,2004年完善总结。应用范围包含物体辨识、机器人地图感知与导航、影像缝合、3D模型建立、手势辨识、影像追踪和动作比对等领域。
SIFT算法的实质是在不同的尺度空间上查找关键点(特征点),并计算出关键点的方向。SIFT所查找到的关键点是一些十分突出,不会因光照,仿射变换和噪音等因素而变化的点,如角点、边缘点、暗区的亮点及亮区的暗点等。
1.1 基本流程
Lowe将SIFT算法分解为如下四步:
尺度空间极值检测:搜索所有尺度上的图像位置。通过高斯差分函数来识别潜在的对于尺度和旋转不变的关键点。
关键点定位:在每个候选的位置上,通过一个拟合精细的模型来确定位置和尺度。关键点的选择依据于它们的稳定程度。
关键点方向确定:基于图像局部的梯度方向,分配给每个关键点位置一个或多个方向。所有后面的对图像数据的操作都相对于关键点的方向、尺度和位置进行变换,从而保证了对于这些变换的不变性。
关键点描述:在每个关键点周围的邻域内,在选定的尺度上测量图像局部的梯度。这些梯度作为关键点的描述符,它允许比较大的局部形状的变形或光照变化。
我们就沿着Lowe的步骤,对SIFT算法的实现过程进行介绍:
1.2 尺度空间极值检测
在不同的尺度空间是不能使用相同的窗口检测极值点,对小的关键点使用小的窗口,对大的关键点使用大的窗口,为了达到上述目的,我们使用尺度空间滤波器。
高斯核是唯一可以产生多尺度空间的核函数。-《Scale-space theory: A basic tool for analysing structures at different scales》。
一个图像的尺度空间L(x,y,σ),定义为原始图像I(x,y)与一个可变尺度的2维高斯函数G(x,y,σ)卷积运算 ,即:
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 56万+
56万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









