






A星路径规划算法,Matlab实现A星算法,可自己改变地图和障碍物,自定义起点坐标和终点坐标
ID:2328678580325449
THXyu
A星算法(A* algorithm)是一种常用的路径规划算法,被广泛应用于图形学、人工智能和机器人领域。本文将介绍A星算法的原理及其在Matlab中的实现,同时探讨如何自定义地图、障碍物、起始点和目标点。
首先,我们来了解A星算法的原理。A星算法是一种启发式搜索算法,它通过估计每个节点的开销来找到从起始点到目标点的最短路径。算法的核心思想是维护两个集合:开放集合和关闭集合。开放集合包含待探索的节点,而关闭集合则包含已经探索过的节点。
A星算法通过对每个待探索节点计算一个综合评估值来决定下一个探索的节点。该评估值由两部分组成:节点的实际开销(G值)和节点到目标点的估算开销(H值)。G值表示从起始点到当前节点的实际开销,H值则是通过一种启发式估算方法计算得到的当前节点到目标点的开销估算。A星算法使用的启发式估算方法可以根据实际问题的需求进行调整,以提高搜索效率和路径质量。
在Matlab中实现A星算法,我们首先需要定义地图、障碍物、起始点和目标点。地图可以通过矩阵表示,其中不同的值代表不同的地形。障碍物则是地图中的一部分,可以通过特定的值表示。起始点和目标点的坐标可以由用户自定义。
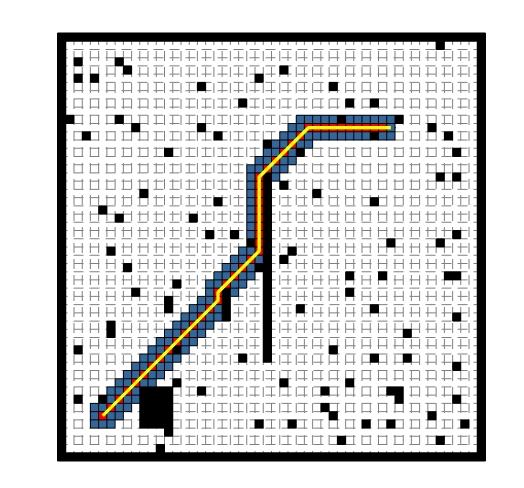
接下来,我们需要编写代码来实现A星算法。首先,我们可以定义一个函数来表示地图,并将障碍物和起始点、目标点添加到地图中。然后,我们可以编写一个函数来计算节点的G值和H值,并根据这些值计算综合评估值。接着,我们可以编写一个函数来实现A星算法的具体搜索过程,通过不断更新开放集合和关闭集合,找到最短路径。最后,我们可以编写一个函数来可视化路径,并输出最短路径的坐标。
使用Matlab实现A星算法具有一定的灵活性,用户可以根据自己的需求在代码中进行相应的修改。比如,可以通过改变地图和障碍物的数值来模拟不同的地形和障碍物分布;也可以自定义起始点和目标点的坐标,以适应不同的场景需求。此外,Matlab提供了丰富的绘图和可视化函数,可以方便地将最短路径可视化展示出来,使其更加直观。
总结起来,本文介绍了A星算法的原理及其在Matlab中的实现。通过自定义地图、障碍物、起始点和目标点,用户可以根据实际需求应用A星算法进行路径规划。Matlab提供了灵活的编程环境和可视化功能,可以方便地调试和优化算法,同时将最终的路径结果直观地展示出来。希望本文能够帮助读者更好地理解和应用A星算法,为解决实际问题提供思路和方法。
(字数:约830字)
相关的代码,程序地址如下:http://matup.cn/678580325449.html
















 253
253

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









