






PMSM,最小二乘法转动惯量辨识仿真,可选s函数或m函数(默认s)辩识,附参考资料简单,纯手工搭建。
ID:3440690491153396
开挂儿的乐

PMSM是永磁同步电机(Permanent Magnet Synchronous Motor)的缩写。作为一种先进的电机类型,PMSM在工业和汽车领域具有广泛的应用前景。在开发和优化PMSM控制算法的过程中,准确和可靠的转动惯量(Rotational Inertia)辨识是非常重要的一步。本文将介绍一种基于最小二乘法(Least Squares Method)的PMSM转动惯量辨识仿真方法,并提供了两种不同的辨识函数的选择(s函数或m函数,其中默认为s函数)。同时,本文还提供了一些简单的参考资料,以帮助读者更好地理解和应用此方法。
在PMSM控制算法的开发和优化过程中,准确地辨识出电机的转动惯量是非常重要的。转动惯量是描述物体对转动运动的惯性特性的物理量,对于电机系统的动态响应、扭矩控制和稳定性等方面都具有重要的影响。因此,通过辨识转动惯量可以更好地理解和优化PMSM的控制性能。
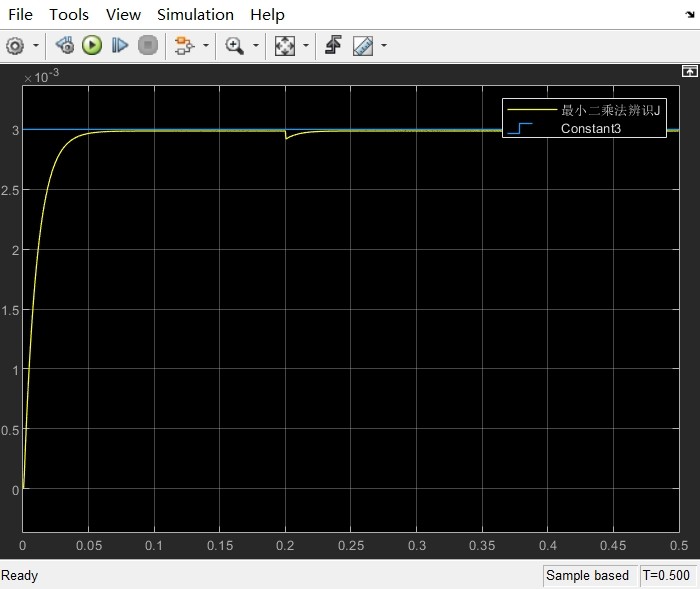
最小二乘法是一种常用的数据拟合和参数辨识方法,适用于对实验数据进行拟合和参数辨识。在PMSM转动惯量辨识中,我们可以利用最小二乘法来拟合电机的动态响应数据,从而求解出转动惯量的估计值。最小二乘法的基本思想是使得实际观测值和拟合值之间的误差平方和最小,从而得到最优的参数估计值。通过对拟合误差进行统计分析,我们可以确定辨识结果的可靠性和准确性。
在进行PMSM转动惯量辨识时,我们可以选择不同的辨识函数来进行拟合。本文提供了两种常用的辨识函数选择,分别是s函数和m函数。s函数是一种常用的静态函数,能够较好地拟合实际数据。m函数是一种更为灵活的动态函数,可以更好地适应不同的实验条件和电机特性。在实际应用中,读者可以根据具体的需求选择适合的辨识函数。需要注意的是,本文默认的辨识函数为s函数。
为了帮助读者更好地理解和应用本文介绍的方法,我们提供了一些简单的参考资料。这些参考资料包括一些基本概念的解释和示例,以及一些实验数据的简单说明。读者可以根据自己的需要,选择适合的参考资料进行学习和实践。这些参考资料的目的是帮助读者更深入地理解PMSM转动惯量辨识的原理和方法,以便能够更好地应用到实际的控制算法开发和优化中。
总之,本文介绍了一种基于最小二乘法的PMSM转动惯量辨识仿真方法,并提供了两种不同的辨识函数的选择(s函数或m函数)。同时,本文还提供了一些简单的参考资料,以帮助读者更好地理解和应用此方法。通过本文的阐述,读者可以更好地了解PMSM转动惯量辨识的原理和方法,从而能够在实际的控制算法开发和优化中更好地应用此技术。
【相关代码 程序地址】: http://nodep.cn/690491153396.html















 553
553











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









