







unbutu16.04+ros kinetic的安装与环境配置问题解决简记
unbutu的安装
1.在unbutu官网上下载好相应的iso镜像文件。
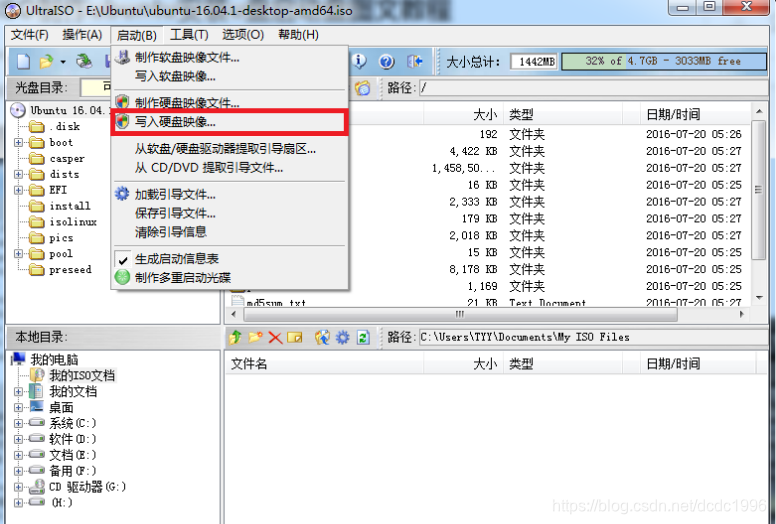
2.利用UltraISO软件将U盘制作成启动盘

3.按红色框的按钮找到下载好的iso文件,然后点击”启动——写入硬盘映像。
 4.选择相应的硬盘驱动器(注意:硬盘会被格式化,所有文件都会被删除)
4.选择相应的硬盘驱动器(注意:硬盘会被格式化,所有文件都会被删除)
5.根据电脑的不同设置好U盘作为启动盘,重启电脑。
6.选择中文然后一步一步继续,这个unbutu系统安装的比较快(我是将win10系统整体删除了,安装过程中可以选择是双系统还是将之前的系统删除,如果是双系统建议分给unbutu系统100G左右的空间)
7.安装完成之后需要将系统软件源配置为国内快速更新源如:aliyun,sohu等

ros系统的安装
添加软件源
1.ctrl+alt+T打开终端
2.输入命令,添加添加软件源:
ROS官方软件源镜像:sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
3.添加密钥:
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key 421C365BD9FF1F717815A3895523BAEEB01FA116
4.更新package
sudo apt-get update
5.安装ROS kinetic完整版
sudo apt-get install ros-kinetic-desktop-full
6.初始化rosdep
1 sudo rosdep init
2 rosdep update
7.设置环境变量
1</ 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章















 3802
3802











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









