







水面无人艇局部危险避障算法研究
Local Risk Obstacle Avoidance Algorithm of USV
博主 的硕士毕业论文
第1章 绪论
1.1 引言
随着世界人口的不断增长以及世界经济快速发展的需求,陆地资源被人类以更快的速度消耗着。人类赖以生存的陆地资源已日益减少,人类也在逐渐地将目光投向海洋,以期从海洋获取更多的资源。海洋战略地位的不断提高,促使世界各国也竞相采取各种措施,来提高海洋在自身国家安全与发展中的地位,在这块各国争夺与较量的宝地中取得一席之地。
我国拥有包括内水、领海、领海专属经济区和大陆架在内的海洋国土面积约299.7万平方公里。然而,尽管作为海洋大国,中国仍就面临着海洋划界争端等诸多问题,仍有约120万平方公里的海域处于争议当中;同时周边海域热点频发,使得海洋权益的维护更加严峻和复杂。2012年9月,我国国务院正式发布了《“十二五”国家战略性新兴产业发展规划》,作为我国新兴产业发展的指导性文件,该《规划》部署了将海洋领域在“十二五”期间作为重点发展的新兴产业。2013年11月23日,我国宣布在东海设立防空识别区,该区覆盖了东海的大部分海域,减少了沿海国防安全的潜在威胁,有效的维护了我国海洋权益。对内公布新兴产业发展规划,对外设立防空识别区,这充分体现了我国对海洋资源合理开发利用的高度重视,和维护海洋权益、捍卫国家领土完整的坚定决心。
水面无人艇(USV,Unmanned Surface Vehicle)属于自主式海洋运载器,其优势是在不适合载人船艇或者危险情况下执行任务
[1]
。相比于无人机、地面机器人和水下机器人等,水面无人艇的发展起步较晚,但是随着海洋地位的提高,其发展势头强劲。目前,水面无人艇在军事、民用领域的应用也频频见诸报端
[2]
。相比于其它无人驾驶运载工具,只有水面无人艇(USV)可以在水上、水面和水下环境中同时发挥作用;且无人艇具有智能化、模块化、体积小、无人、高速、机动灵活、适应各种气候环境、性价比高等优势
[3]
,不难看出海面无人艇将在海洋的探索和开发利用中,以及在未来可能的海上冲突等军事的应用中起到不可忽视的作用。
在水面无人艇的研究和应用课题中,智能化将是其发展的一个重要方向。水面无人艇的智能化关键技术主要体现在:自主综合驾控技术、水面目标的探测与自主识别技术、自主导航技术、智能规划与决策技术
[2]
等方面。而我国在这方面仍处于起步阶段,很多技术还相当薄弱,与美国等发达国家相比,存在巨大的差距。虽然我们在USV方面的研究起步较晚,但已经越来越受到人们的重视,国内也有很多学者开始研究USV的相关技术。
1.2 国内外水面无人艇研究现状
1.2.1 国外水面无人艇研究现状
水面无人艇技术的发展可以追溯到第二次世界大战,首次尝试是设计成鱼雷形状清除沿海区域的地雷和障碍物;1946年,在基尼环礁进行核试验后,无人艇被用来收集该地的放射性水样 [6]3 ;另一个常见用法是(现在仍然是)使用无人艇作为目标靶船进行训练。目前,水面无人艇在民用、军事上的成功应用都展现了其广阔的前景,世界上诸多发达国家也都在其相关技术的研究中投入了大量的金钱和精力。其中,美国和以色列开始较早,相关的技术更加成熟;其它发达国家如德国、英国、法国、日本等国,在无人艇研制方面已经取得了很大的进展,并已经有相当多的研究成果得到了实际的应用。
1.2.1.1 美国水面无人艇研究现状
上世纪90年代,美国海军开始研发和制造水面无人艇。2007年,美国海军发布了《海军USV主计划》,确定了优先发展无人艇的7项任务:反水雷战(MCM)、反潜战(ASW)、海上安全(MS)、水面作战(SUW)、支持特种部队作战(SOF)、电子战(EW)和支持海上拦截(MIO)
[7]xi
。同时,还定义了无人艇的船型、标准等要素,这标志着美国无人艇的研制真正走上了正规的发展阶段。先进的技术支持及雄厚的财力,使得美国在无人艇开发研制方面一直处于领先地位;不仅已有多种代表性的先进无人艇投入了使用,并且新型号的无人艇、新技术也不断涌现。
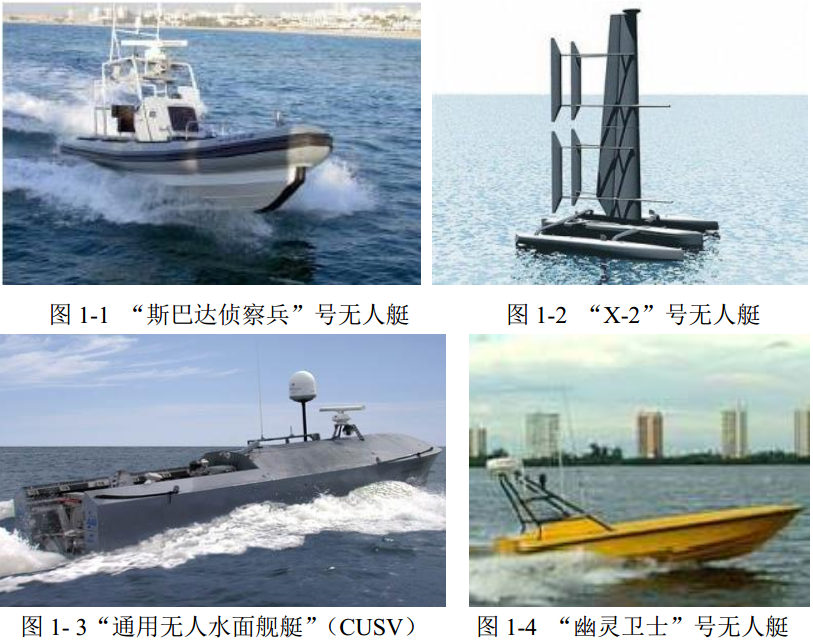
图1-1 “斯巴达侦察兵”号无人艇 图1-2 “X-2”号无人艇
图1- 3“通用无人水面舰艇”(CUSV) 图1-4 “幽灵卫士”号无人艇
图1-1为“斯巴达侦察兵”号无人艇(Spartan Scout USV)。该艇是硬壳充气高速USV,由美国主持,联合法国、新加坡共同完成研制。在艏部,装有基于“直升机折叠式声系统”(FLASH),可以进行主动吊放声纳,实现反潜。目前,该艇已经被部署在美国海军的“葛底斯堡”号巡洋舰上,并在海湾地区的“持久自由运动”和“伊拉克自由行动”等作战任务中得到了检验
[8]
。其相关参数及功能和该艇的特点见表1.1。
表 1- 1美国各型水面无人艇参数表(不完全统计)
| 舰名 | 制造/试验时间 | 尺寸(米) | 续航力 | 最大航速(节) | 功能 | 特点 |
|---|---|---|---|---|---|---|
| 海上猫头鹰 | 1993 | 3 | 10h/12kn 24h/5kn | 45 | 雷区侦察、浅海监视、海上拦截 | 吃水18cm,可在近岸浅滩活动 |
| 斯巴达侦察兵 | 2002 | 7/11 | 8h/28h | 50 | 情报、监视、侦查,反水雷,反舰,反潜 | 刚性平底充气艇,模块化设 |
| 幽灵卫士 | 2003.9 | 8 | >24h | >40 | 海上警戒和防护 | 无人摩托艇,可人控 |
| 海虎鱼 | 2003.3 | 8 | >24h | >40 | 水上靶标 | —— |
| AN/WLD-1 | 2003.1 | 7 | 20-40h | >10 | 反水雷,反潜,水面监视和沿海情报侦察与收集 | 介于无人潜航器和无人水面艇之间,兼有两者的优点 |
| 三体船型无人水面艇 | 2003.10 | 8.15 | —— | 35 | 情报监视,侦察搜索和水雷对抗 | 三体船,6级恶劣海况中可使用 |
| 拦截者 | 2007 | 7/11 | —— | 43 | 安全保卫,公众服务,反海盗巡逻、港口保安和海上油井监控 | 能利用舰艇和直升机部署,还可依靠降落伞空投,可到“地球任意角落”执行任务 |
| 食人鱼 | 2010 | 16.5 | 2170nm | —— | 港口和海岸巡逻,搜索与救援,打击海盗及反潜 | 用最新的碳纤维和纳米管复合材料建造 |
| X-2 | 2011.9 | 15 | —— | 30 | 海岸监视,禁毒,拦截,巡逻 | 三体船,有合成桅杆,可以海风作动力,8级海浪中可自主巡航 |
| “通用无人水面舰艇”(CUSV) | 2012.4.12 | 12 | 1930nm | 28 | 情报监视,侦察,拖曳,反水雷,反潜,反水面战,通信中继、发射回收无人机 | 可由16到19公里以外的指挥站遥控指挥,可在只有1.5米深的水域航行 |
图1-2为美国海军新型的三体水面无人侦查艇“X-2”号,能以15kn至30kn的航速在8级海浪中进行自主航行。它的合成桅杆约有6层楼高,同时,该桅杆还是一根集合了数据链及控制系统的天线。其除了能以风帆进行巡航外,还配备了电动引擎作为备用动力。通过GPS与无线电,数百千米之外的控制人员可通过操作平台输入命令,经卫星传输后,桅杆里的天线就会接收到命令,并传到无人艇的操控系统内。进行远程操控的整个过程只需要18秒,定位控制精度为3米以内。
图1-3为“通用无人驾驶水面舰艇”(CUSV),美国德事隆公司(防务承包商)于2012年4月12日在新奥尔良的一家造船厂进行了展示,其最高时速28kn。该无人艇的吃水较浅,只需1.5米深即可航行,同时,它采用了无人侦察机技术(已在中东执行了七十万小时飞行任务),可通过卫星控制系统远程遥控指挥。
美国其它型号的水面无人艇还包括:作为美国开发水面无人艇的首个型号的“海上猫头鹰”
[9]
;美国机器人船舶公司推出的“幽灵卫士”无人摩托艇(见图1-4),及麦格基特防务公司推出的“海虎鱼”无人摩托艇;同时兼具水下、水上无人平台优点的AN/WLD-1无人远程猎雷艇;可在6级恶劣海况下使用的三体船型无人水面艇;攻击作战用的大型水面无人艇“蓝色骑士”号;被美国海军正式列装的“舰队”型无人水面艇;使用最新的碳纤维-纳米管复合材料建造而成的“食人鱼”等。其相关参数见表1-1。
1.2.1.2 以色列水面无人艇研究现状
尽管以色列是中东小国,但特别注意减少战斗人员伤亡,军事科技研究和开发的能力也相当高,尤其在USV、无人机和其他无人平台研究领域领先于其它国家。以色列有三家USV研究机构:埃尔比特(Elbit)系统公司、拉斐尔(Rafael)公司和航空防务公司,每个公司都有自己的相应水面无人艇产品,并均对外出口了水面无人艇。

图1-5“保护者”号无人艇 图1-6“KATANA”号无人艇
图1-7“海星”号 图1-8“黄貂鱼”号 图1-9“银色马林鱼”号
2003年,以色列拉斐尔公司和航空防务公司联合研制的“保护者”号无人艇(见图1-5)交付以色列国防军使用,该艇是以色列无人艇研究的代表
[10]
。从2009年至今,该艇在黎巴嫩海岸执行了多次巡逻任务,以对真主党实现监控。该艇的建造采用轻质复合材料,航速最高达40节,机动灵活。
以色列航空防务公司于2005年独立开发了“海星”号无人艇(见图1-7),是一种硬壳充气式无人艇。同年,在土耳其国际防务展上首次公开了“黄貂鱼”号USV(见图1-8),是由埃尔比特系统公司独资研制的。图1-9为“银色马林鱼”号无人艇,该USV被称为第二代无人艇
[11]
,由埃尔比特系统公司于2006年12月6日公布。图1-6为新一代水面无人艇“KATANA”,由以色列航空防务公司于2014年2月5日推出
[12]
,可自主导航,也可由人遥控操作。以色列各型水面无人艇参数见表1-2。
表 1- 2以色列各型水面无人艇参数表(不完全统计)
| 舰名 | 制造/试验时间 | 尺寸(米) | 续航力 | 最大航速(节) | 功能 | 特点 |
|---|---|---|---|---|---|---|
| 保护者 | 2003 | 9 | 3950nm | 40 | 海上兵力保护,情报监视和侦察,反水雷战,电子战,精确打击,反恐 | 结构模块化,外观隐身化,传感器先进,武器多样化,重量轻 |
| 海星 | 2005 | 11 | 300nm | 40 | 监视,侦查,反水雷战和电子战 | 硬壳充气式无人水面艇 |
| 黄貂鱼 | 2005 | 8 | >8h | 40 | 近岸情报侦查与监视,电子战,电子侦察 | 可遥控,仅限于在近岸浅海水域活动 |
| 银色马林鱼 | 2006.12.6 | 10.67 | 24h | 45 | 情报,监视和侦察,兵力保护,反恐,反舰和反水雷,搜索与救援,港口和水道巡逻以及电子战 | 可以遥控但主要是自主操作 |
| KATANA | 2014.2.5 | —— | —— | —— | 保护专属经济区、海上边界、港口安全、离岸天然气钻井平台和管道,浅水巡逻和电子战 | 可全自动操作,也可由人遥控操作 |
1.2.1.3 其它国家水面无人艇研究现状
其它军事强国在USV研制方面也不甘落后,具有代表性的有:法国、英国、意大利、日本、德国、瑞典、白俄罗斯等国,这些国家均已研制出本国的无人艇,并有相当一部分无人艇已投入实际应用。各国水面无人艇参数详见表 1- 3。
表 1- 3其它国家各型水面无人艇参数表(不完全统计)
| 制造国 | 舰名 | 制造/试验时间 | 尺寸(米) | 续航力 | 最大航速(节) | 功能 | 特点 |
|---|---|---|---|---|---|---|---|
| 法国 | FDS-3 | 1999 | 8.3 | >20h | 12 | 反水雷,航道清扫,港口搜索 | 半潜式反水雷艇 |
| Rodeur | 2007 | 9.2 | —— | —— | 猎雷,反潜战,保护/监视,海洋污染调查/化学检测,细菌/辐射探测 | 可执行多种使命任务的全自动水面艇 | |
| 英国 | 猎雷艇 | 2003 | —— | —— | —— | 扫雷和航道清理工作 | —— |
| 英国 | 卫兵 | 2007 | 3.5 | 6h | 50 | 港口巡逻,情报监视侦察,拦截入侵 | 基于高速滑行艇体的紧凑型喷气滑行艇 |
| 意大利 | Charlie | 2005 | 2.4 | —— | —— | —— | 利用无刷 DC 直流电机驱动 |
| 日本 | OT-91 | 2005.10 | 4.4 | >20h | 40 | 海上情报侦查和反水雷 | 喷水推进 |
| 德国 | 泽维泽尔 | 2008 | 3.3 | 250nm | 27/10 | 海上情报侦查 | 使用玻璃钢材料,使其重量降至50公斤 |
| 瑞典 | SAM3 | 2008.7 | 14.4 | —— | —— | 扫雷 | 双体船,采用非永磁复合材料,可在3~60米的浅水区域作业 |
| 白俄罗斯 | 海上多功能无人艇 | 2013.11 | 6 | 300nm | 54 | 海上经济区观测,海上搜救,巡逻,近海防卫 | 隐身效果,体积小不易被发现,也不易被击沉 |
2013年11月27日,白俄罗斯第一艘无人艇“海上多功能无人艇”在其首都北部进行了试航。参与研制该无人艇的国家有中国、白俄罗斯及俄罗斯。俄罗斯圣彼得堡的一家船厂负责设计,中国进行了该艇外壳聚合物盔甲的安装,白俄罗斯则主要负责内部电子设备的安装。

图1-10“Rodeur”号 图1-11英国的“Springer”号 图1-12“Charlie”号
图1-13“OT-91”号 图1-14“泽维泽尔”号 图1-15“海上多功能无人艇”
1.2.2 国内水面无人艇研究现状
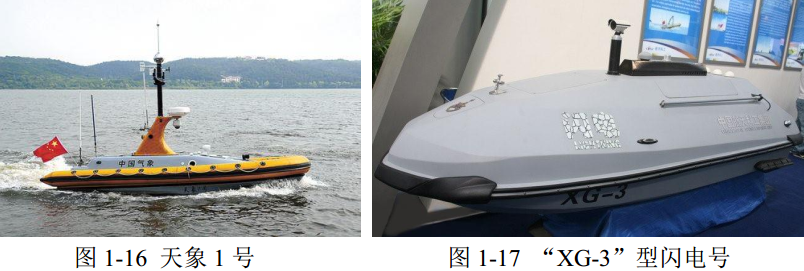
图1-16 天象1号 图1-17 “XG-3”型闪电号
国内水面无人艇研究起步较晚,相关技术也较弱。我国进行USV研究的机构有:哈尔滨工程大学、大连海事大学、上海海事大学、江苏科技大学、中国航天科工集团沈阳新光公司、沈阳自动化所、中华造船厂等。
1972年,中华造船厂(现沪东中华造船厂)建造了我国第一艘无人遥控扫雷艇,但相比于当时世界其它无人艇,其技术较为落后。2002年,我国北方一基地装备修理厂把退役的导弹快艇改造成无人遥控靶船,实现了远程遥控指挥。
目前在国内,中国航天科工集团沈阳新光公司在USV的研制上处于领先地位。在2006年的珠海航展上,该公司展示了国产新型“XG-2”型水面无人概念艇。在此概念艇的基础上,2008年由中国气象局大气探测技术中心和航天新光合作,共同研发了“天象一号”USV
[13]
(见图1-16)。“天象一号”既可人工遥控,也可按预定航线自主航行。该艇长6.5米,全艇采用碳纤维材料,集智能驾驶、雷达搜索、GPS、图像传输与处理模块等于一身。2008年的青岛奥帆赛,该艇作为赛事气象应急装备提供了气象保障服务。同年11月的珠海航展上,沈阳新光又展示了新型“XG-3”型闪电号水面无人艇(见图1-17),可完成较恶劣海况下的探测、侦查甚至是小目标攻击等任务。闪电号速度较快,通常情况下航速可达50kn,极限情况下航速可超过60kn。该集团研发的这两艘国内先进的水面无人艇中,“天象一号”侧重于民用,闪电号速度快,军用潜力较大。
2007年,北京铭尼科科技有限公司推出了一款USV
[14]
。该艇长7-11米,最大航速可达35Kn,可远程控制,机动灵活性极强,具备执行多种任务的能力。国内其它科研机构,如哈尔滨工程大学、大连海事大学、上海海事大学、江苏科技大学等在水面无人艇均进行了相关的研究
[15−17]
。
目前,我国在智能水面无人艇方面的研究仍在起步阶段,经过多年的不断发展与探索,也取得了一定的成就。但整体来说,相比于世界上其余USV发达国家,仍差距显著,许多关键技术亟待解决。
1.3 研究内容及结构安排
本文将水面无人艇局部危险避障分为三层进行考虑:基于PSO的已知静态路径规划方法,基于PSO并融合海事规则的已知动态路径规划方法,和基于滚动窗口的未知环境下的避障方法。前两层是基于环境先验知识的已知局部危险避障,第三层是基于传感器知识的未知局部危险避障。全文的结构安排如下:
第二章对水面无人艇局部危险避障进行了概述,介绍了自主移动机器人学领域的经典危险避障算法和一些智能算法;并论述了无人艇局部危险避障算法国内外研究现状。
第三章对基于PSO的已知静态路径规划算法进行了论述。首先提出了将障碍物进行更贴合实际形状的模拟(外包圆和有向包围盒),从而得到更多的有效路径区间。之后论述了极坐标系下的粒子群路径规划方法的参数设置,及路径可行域的求解;并引入了启发式知识对粒子群路径规划算法的路径进行初始化。最后,引入路径平滑优化处理方法,以提高无人艇避障的可行性。
第四章对基于PSO并融合海事规则的已知动态路径规划方法进行了论述。首先对动态已知障碍物建立了避障模型,得出了完成对动态已知障碍物规避的条件。之后论述了国际海上避碰规则公约对无人艇避障行为的约束。最终,将海事规则融合进基于PSO的已知动态路径规划算法。
第五章对基于滚动窗口的未知环境下的避障方法进行了论述。首先对基本的滚动窗口动态路径规划方法进行了概述,并提出了该方法的不足。针对水面无人艇未知环境下的避障问题,利用模型预测控制及滚动优化原理,结合滚动窗口方法,解决动态未知环境下的实时避障问题。
第六章首先介绍了自行开发的水面无人艇局部危险避障算法仿真实验平台;然后在仿真实验平台上建立包含三种障碍物的环境,并对三层避障算法进行综合的仿真实验分析,以验证本文所提出的三层避障算法的可行性和有效性。
最后,根据全文的理论分析和三层避障算法仿真实验结果,得出本文的结论;在总结全文工作同时,提出论文中的不足和需要改进的地方。
博主 的硕士毕业论文
===========文档信息============
版权声明:非商用自由转载-保持署名-注明出处
署名(BY) :dkjkls(dkj卡洛斯)
文章出处:http://my.csdn.net/dkjkls















 5939
5939

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









