







 本文详细介绍了如何使用欧姆龙CP1H-X40DT-D PLC与松下A6伺服驱动器MADLN15SE进行连接和试运行。内容包括接线步骤、参数设置以及PLC编程,旨在提供一个实用的伺服电机控制方案。
本文详细介绍了如何使用欧姆龙CP1H-X40DT-D PLC与松下A6伺服驱动器MADLN15SE进行连接和试运行。内容包括接线步骤、参数设置以及PLC编程,旨在提供一个实用的伺服电机控制方案。
今年是2019年,松下A6伺服驱动器及电机已经全面铺货,完全替代市场上的A5型号。除了更换接口一样,无忧升级,性能更是在原来的基础上提高了20%以上。在很多行业,大家已经基本上默认了松下电机在此行业中应用的效果与优势,纷纷采用其电控执行部件。在此我想以我们常用的简单应用方案一步一步将CP1H-X40DT-D与MADLN15SE进行连机试运行。作为一个实用例子,这个试运行方案完全可以经过一定的完善后来移植到大型项目上。
一、简介:
A6系列家庭大分类:

这里我们选用应用最普遍的经济款A6SE系列。其具有基本功能位置控制模式,可以通过带有脉冲输出功能的PLC去发脉冲驱动电机旋转。PLC我们就选用前面章节讲过的CP1H-X40DT-D,其具有4轴100K脉冲输出,可同时控制4个伺服电机运行。
二、接线
以下图示显示了A5伺服与OMRON专用脉冲输出模块CJ1W-NC113的连接:

其实A6的接线端口X4与此方法完全一样,CP1H的脉冲输出口100.00/100.01完全替代掉CJ1W-NC113模块CW/CCW输出口A6/A8后,即是我们想要的接线方案,下面我们重新制作简单直观点的接线图:
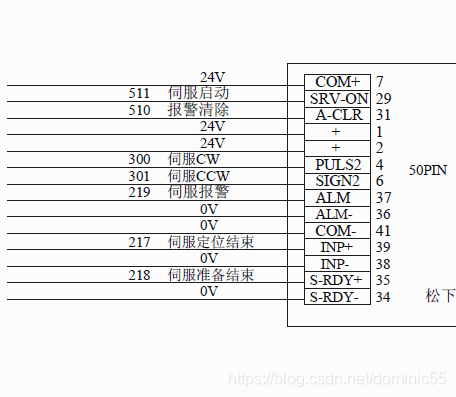
输出点位对应:511--》103.01 , 510--》103.00, 300--》100.00, 301--》100.01
输入点位对应:219--》1.07, 217--》1.05 ,218--》1.06
另外:伺服电机的机械原始位传感器OUT端我们接到PLC的输入点0.02上。
其余口按上图分别供上24V和0V。接线图完成,下面我们给伺服上电,对伺服驱动器进行参数设置。
三、设置

一般我们常需要设置的参数是Pr0.03,Pr0.08 。Pr0.03是伺服的刚性参数,其初始数值是13,调动范围是13-30,将其调大后,伺服的跟随性和定位速度会大大提高,一般我们设置为19,过大的数值会引起电机啸叫。Pr0.08是电子齿轮比,接收到PLC发送的10000个脉冲伺服电机转一圈,其默认值为10000. 假如我有一个使用工况需要伺服电机转100圈,那么就需要PLC发送1000000个脉冲,PLC发送脉冲和伺服执行都需要很长时间。此时我们将Pr0.08修改为100,那么PLC只需要发送10000个脉冲即可。但不可设置过小,不然定位会有很大的累计误差。
注意三点:一是修改完参数要进行保存到内存的操作;二是若修改了Pr0.08,保存后还需要进行驱动器重新上电重启;三是如果不小心改错了参数而又不知道是哪一个项,将驱动进行恢复出厂设置即可。
四、PLC编程
以下编程分为3个小部分,每个部分对于一个完整的控制程序都是必不可少的。当然还有其它部分的控制程序,比如碰撞报警程序、自动复位程序、手动调试程序等等,这里不一一赘述。
4.1 伺服搜索原始位部分
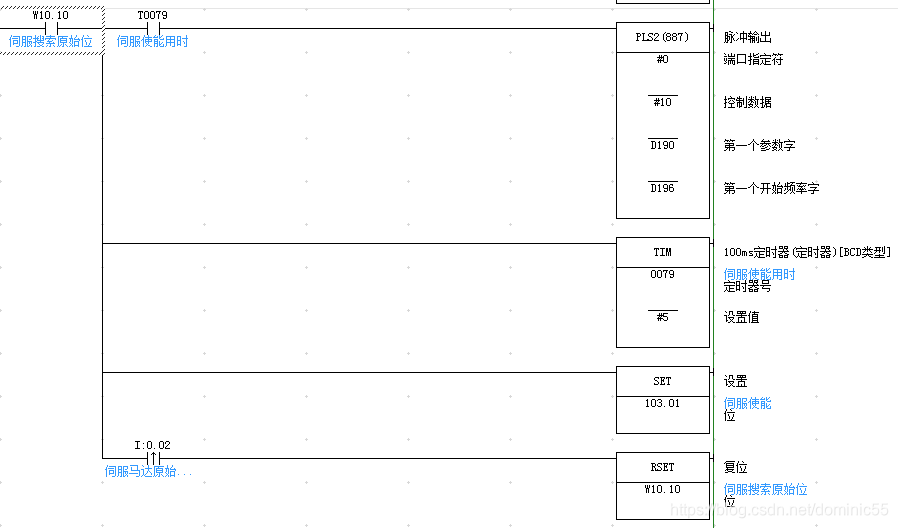
其中W10.10是一个内部辅助继电器,0.02是当前伺服的原始位传感器对应与PLC上的点位。
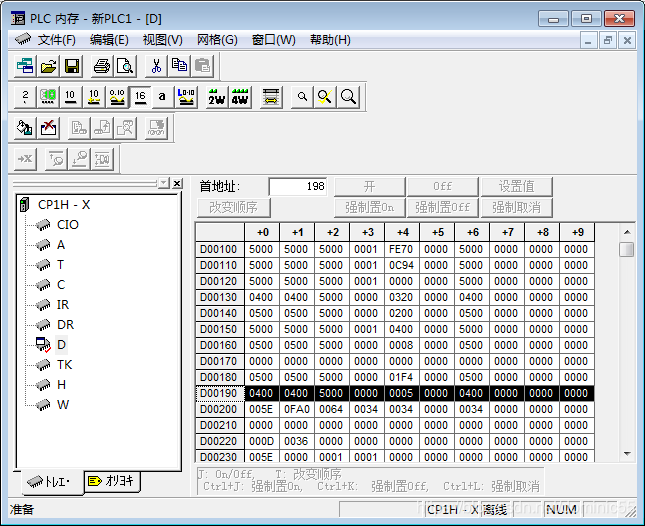
4.2 PLC发脉冲指令PLS2的启动频率、目标频率、加减速频率、还有脉冲当量等
具体参见PLS2指令详细介绍。这些参数保存在PLC的连续几个相邻内存D里,我的D100~D106 , D110~D116 , D190~D196内存值设置参考如下:
4.3 CW/CCW正转反转运行程序部分
CW/CCW都是默认的伺服电机旋转方向,如果其方向与所设计的方向相反,可有两种方法交换方向。一是交换100.00、100.01两个接线端子;二是修改伺服电机参数Pr0.00(第三项【设置】里可设定)。
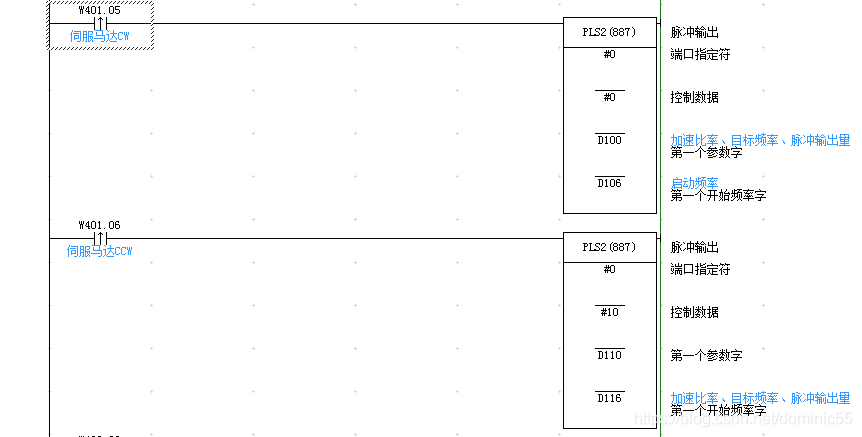
W401.05/W401.06是正反转用内部辅助继电器,你可以换成相应的输入按钮。D100~D106,D110~D116的数值可参照【4.2】中的值。将PLC程序下载到CP1H-X40DT-D中,再灌入内存D的数值,使W401.05或W401.06得电和失电即可试运行。

















 2245
2245

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









