






 本文介绍了一种利用七次非均匀B样条进行轨迹规划的方法,结合NSGAII算法进行时间、能量和冲击的多目标优化,适用于工业自动化,易于调整以适应不同机器人需求。
本文介绍了一种利用七次非均匀B样条进行轨迹规划的方法,结合NSGAII算法进行时间、能量和冲击的多目标优化,适用于工业自动化,易于调整以适应不同机器人需求。
matlab-B样条轨迹规划-1
七次非均匀B样条轨迹规划,
基于NSGAII的时间-能量-冲击最优。
换上自己的关节值和时间就能用,简单好用,
YID:8625738189588326
云中枫叶舞
在现代工业自动化领域,机器人的轨迹规划是一个至关重要的问题。如何使机器人在运动过程中达到最佳的效果,不仅需要考虑到轨迹的平滑性和连续性,还需考虑到时间、能量和冲击等因素。在本文中,我们将介绍一种基于非均匀B样条的轨迹规划方法,并结合NSGAII算法对时间、能量和冲击进行最优化。该方法不仅具有简单好用的特点,还可以根据自己的需求灵活调整关节值和时间。
轨迹规划是指在给定的起始点和目标点之间,通过合理的方式确定机器人的轨迹,使其能够在运动过程中达到预期的效果。传统的轨迹规划方法包括多项式插值、逆运动学解析式等,但这些方法往往无法满足工业自动化应用中各种复杂的要求。而非均匀B样条作为一种常用的曲线拟合技术,具有较好的灵活性和可控性,可以很好地解决这一问题。
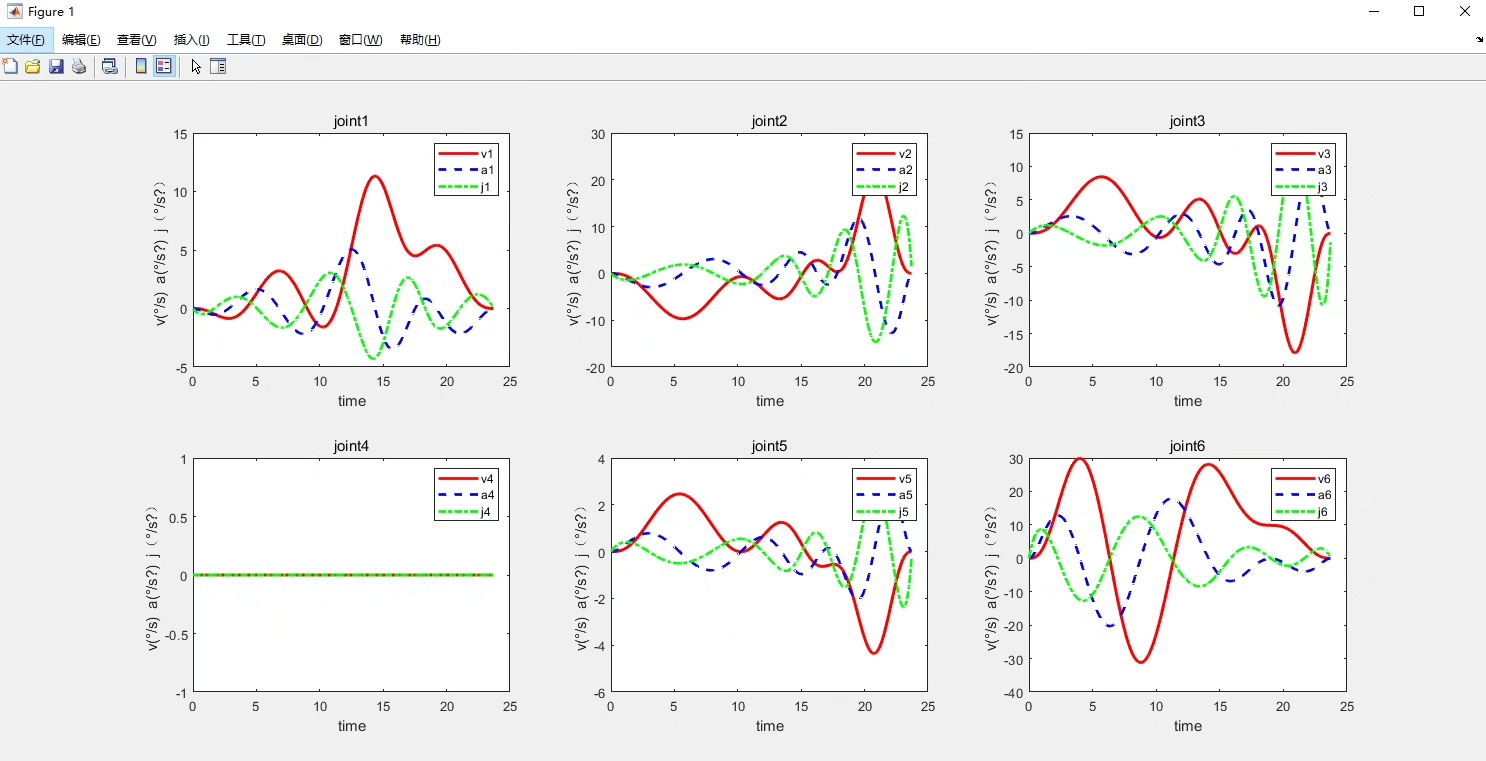
在本文中,我们选取了七次非均匀B样条作为机器人轨迹规划的基础曲线。七次B样条可以提供较高的拟合精度和平滑性,同时还具有较少的控制点数量,从而减少了计算和存储的复杂性。这使得七次非均匀B样条成为了机器人轨迹规划中的一种理想选择。
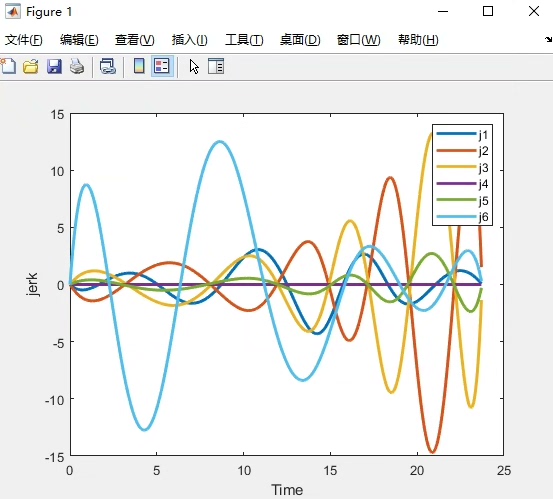
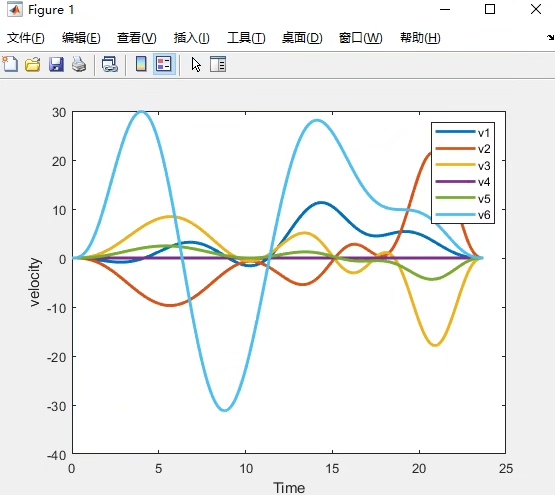
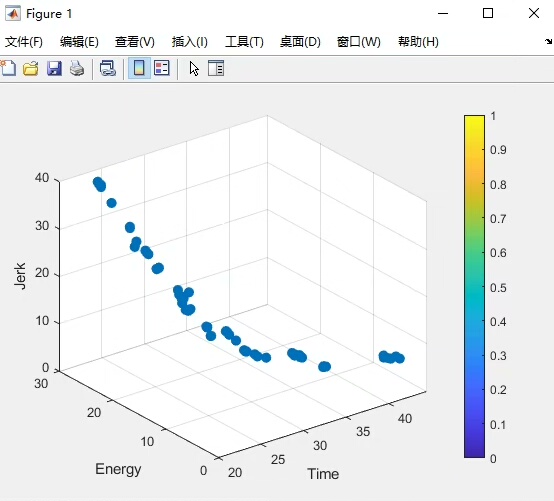
除了选择合适的曲线拟合技术,我们还引入了NSGAII算法来进行轨迹规划中的多目标优化。NSGAII算法是一种经典的多目标遗传算法,可以在给定的目标集合下寻找到一组最优解集。在本文中,我们将时间、能量和冲击作为三个优化的目标,通过NSGAII算法的迭代搜索和选择操作,得到一组时间、能量和冲击最优的轨迹规划解。
我们的方法具有较高的实用性和适用性。与传统的轨迹规划方法相比,我们的方法可以通过简单地调整关节值和时间来适应不同机器人和运动需求的场景。而且,由于我们采用了七次非均匀B样条作为基础曲线,轨迹的平滑性和连续性得到了有效的保证,避免了机器人运动过程中的不稳定和震动。
总之,本文介绍了一种基于七次非均匀B样条的轨迹规划方法,并结合NSGAII算法对时间、能量和冲击进行最优化。该方法具有简单好用、灵活性强等特点,可以满足工业自动化领域中机器人轨迹规划的各种要求。希望本文对读者在实际应用中的轨迹规划问题提供一定的借鉴和参考价值。
相关代码,程序地址:http://lanzoup.cn/738189588326.html















 440
440











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









