







之前写过通过姿态图片文生图(见这里Diffusers代码学习-ControlNet)
对于图生图,通常会将初始图像和提示词传递给管道以生成新图像。使用ControlNet,您可以传递额外的条件输入来指导模型。让我们用深度图来调节模型,深度图是一个包含空间信息的图像。这样,ControlNet可以使用深度图作为控件来引导模型生成保留空间信息的图像。
以下将使用[StableDiffusionControlNetImg2ImgPipeline]执行此任务,这与[StableDiffusionControlNetPipeline]不同,因为它允许传递初始图像作为图像生成过程的起点。同时加载图像并使用的深度估计[~transformer.Pipeline] 提取图像深度图的转换器。
# 以下代码为程序运行进行设置
import torch import os os.environ["HF_ENDPOINT"] = "https://hf-mirror.com" import numpy as np from transformers import pipeline from diffusers.utils import load_image, make_image_grid
# 以下代码引入图像处理环节,并提取图像深度
image = load_image(
"https://hf-mirror.com/datasets/huggingface/documentation-images/resolve/main/diffusers/controlnet-img2img.jpg"
)
def get_depth_map(image, depth_estimator):
image = depth_estimator(image)["depth"]
image = np.array(image)
image = image[:, :, None]
image = np.concatenate([image, image, image], axis=2)
detected_map = torch.from_numpy(image).float() / 255.0
depth_map = detected_map.permute(2, 0, 1)
return depth_map
depth_estimator = pipeline("depth-estimation")
depth_map = get_depth_map(image, depth_estimator).unsqueeze(0).half().to("cuda")
# 以下代码会引入与ControlNet相关的模型,及Scheduler
from diffusers import StableDiffusionControlNetImg2ImgPipeline, ControlNetModel, UniPCMultistepScheduler
controlnet = ControlNetModel.from_pretrained("lllyasviel/control_v11f1p_sd15_depth", torch_dtype=torch.float16, use_safetensors=True)
pipe = StableDiffusionControlNetImg2ImgPipeline.from_pretrained(
"runwayml/stable-diffusion-v1-5", controlnet=controlnet, torch_dtype=torch.float16, use_safetensors=True
)
pipe.scheduler = UniPCMultistepScheduler.from_config(pipe.scheduler.config)
pipe.enable_model_cpu_offload()
# 以下代码由提示词及控制图片生成图片
output = pipe(
"lego batman and robin", image=image, control_image=depth_map,
).images[0]
make_image_grid([image, output], rows=1, cols=2)
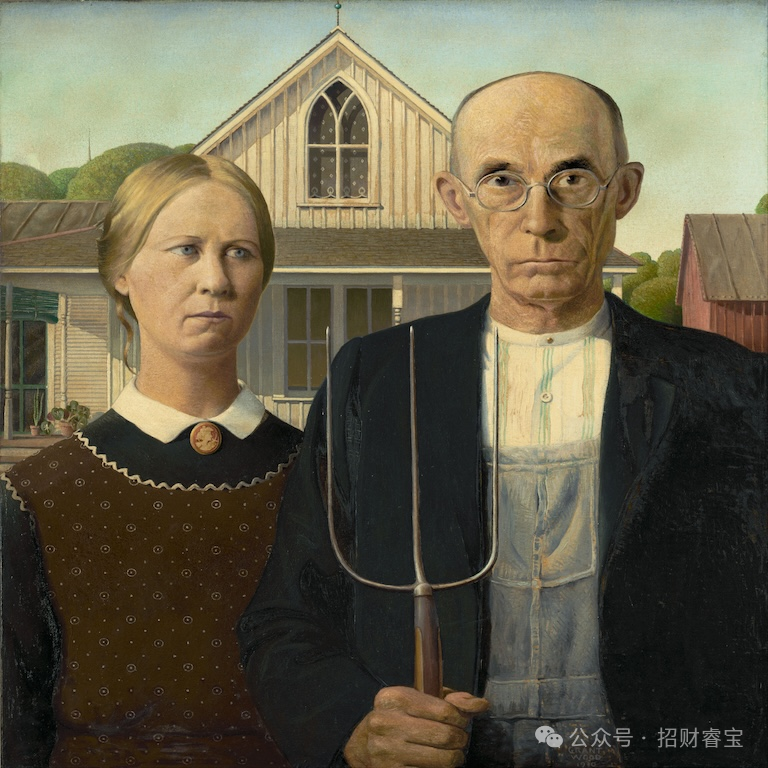
以下为提供深度信息的参考图片
以下为输出结果

AIGC应用37
















 1124
1124

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











