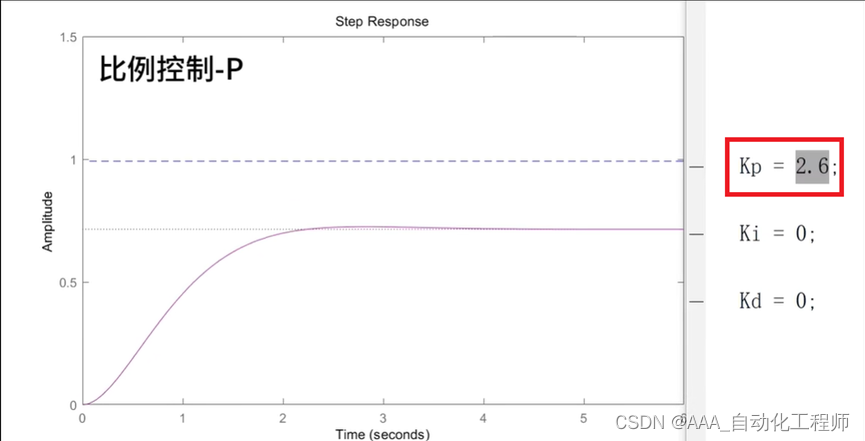
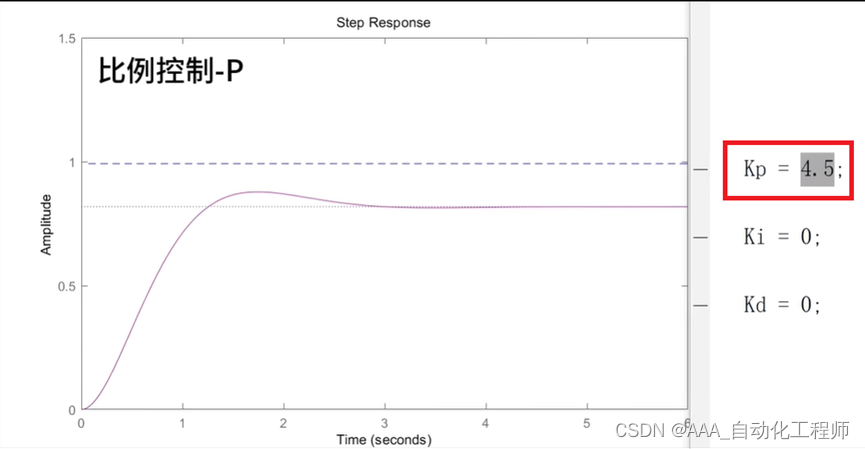
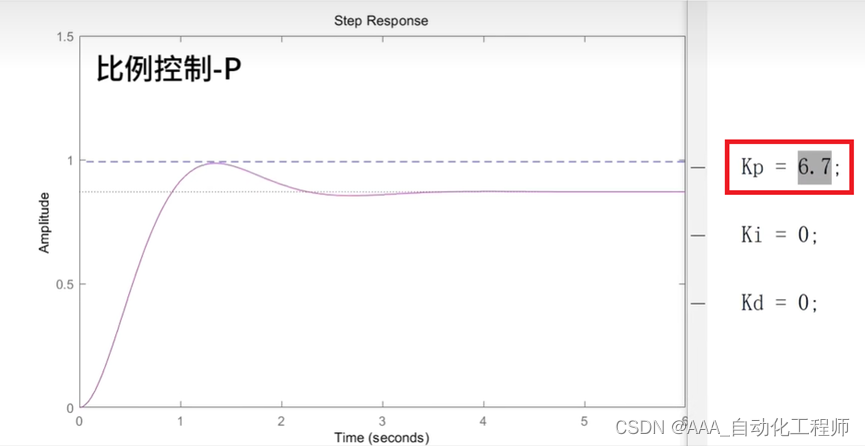
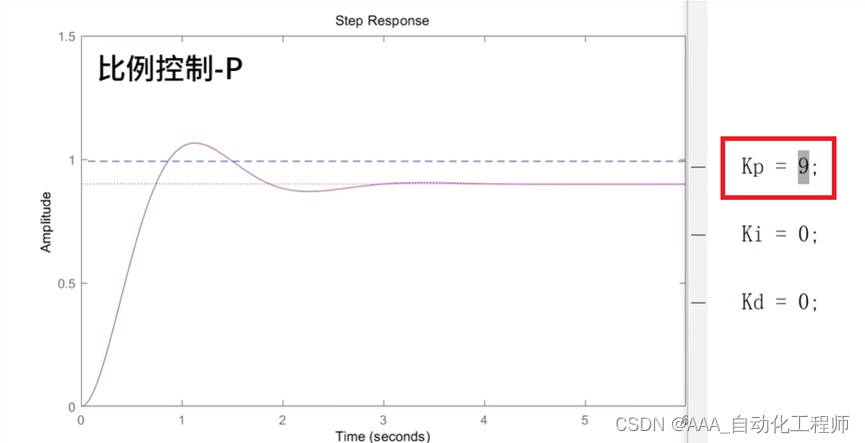
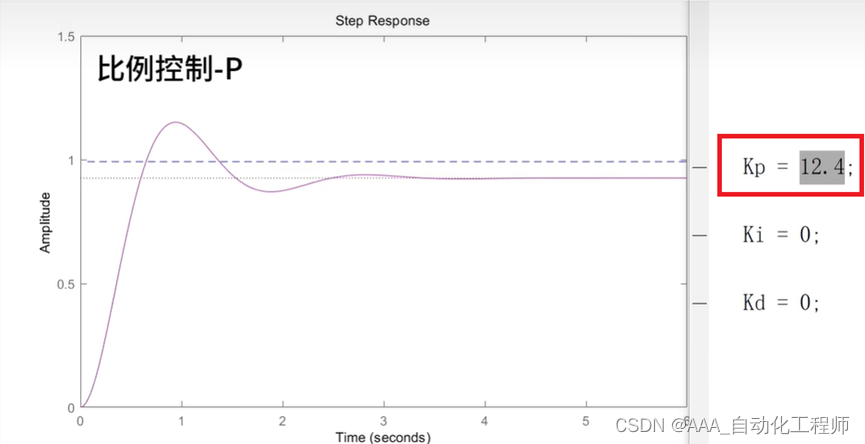
PID控制原理基本介绍(图解) 这里先以一个阶跃响应做图解说明: 如下图所示,目标值设定为单位1,随着我们逐渐增大比例系数Kp,可以看到系统相应速度逐渐加快,但是始终存在稳态误差, 如下图所示,引入积分环节后&#x


 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











 该专栏为热销专栏榜 第60名
该专栏为热销专栏榜 第60名 超级会员免费看
超级会员免费看
 本文通过图解方式介绍了PID控制原理。随着比例系数Kp增大,系统响应速度加快但存在稳态误差;增加积分环节Ki可减少误差,但过度可能导致超调;而微分环节Kd有助于减小超调,改善控制效果。实际应用中需综合考虑干扰因素调整PID参数。
本文通过图解方式介绍了PID控制原理。随着比例系数Kp增大,系统响应速度加快但存在稳态误差;增加积分环节Ki可减少误差,但过度可能导致超调;而微分环节Kd有助于减小超调,改善控制效果。实际应用中需综合考虑干扰因素调整PID参数。

 订阅专栏 解锁全文
订阅专栏 解锁全文



















 15万+
15万+







