






==兄弟姐妹们👬👭,创作不易,点个关注不迷路哦~_~ O T _T O ==
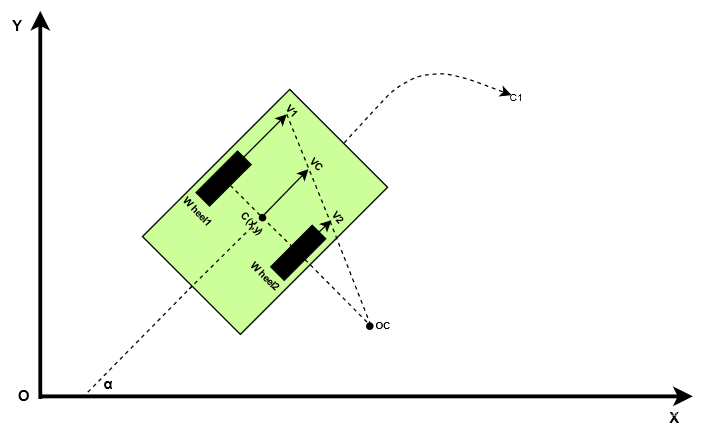
如图所示为小车的为小车简化模型的右转时的原理图,图中C为两侧驱动轮的连线中点, 为转向时的姿态角,V1和V2分别为左右两轮的线速度,Vc为转向时小车的线速度,Oc为小车的转动中心。从图中可以得知小车左侧的车轮的速度V1要比右侧车轮的速度V2大,若维持此速度不变,小车将从位置C移动到位置C1。而实现此现象的原因是:汽车在转弯行驶时,两侧车轮在同一时间内驶过的路程不等,外侧车轮行驶过的路程较内侧车轮长。所以速度快的那一侧车轮相较于速度慢的那一侧车轮与点OC之间转弯半径更大,从而实现了右转的效果。
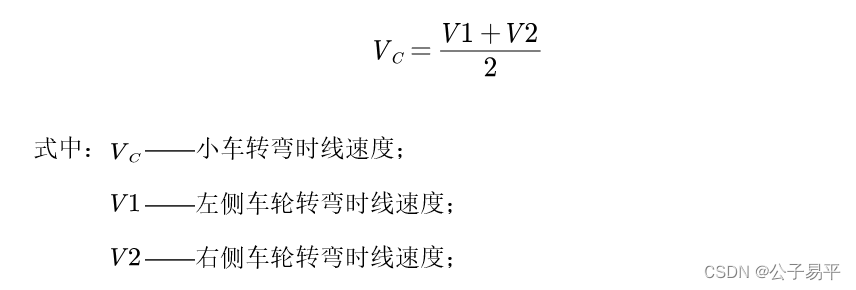
小车左右两侧车轮的速度和小车本身的速度的关系如下述公式所示。两侧车轮的速度之和均值即小车转弯时的线速度。
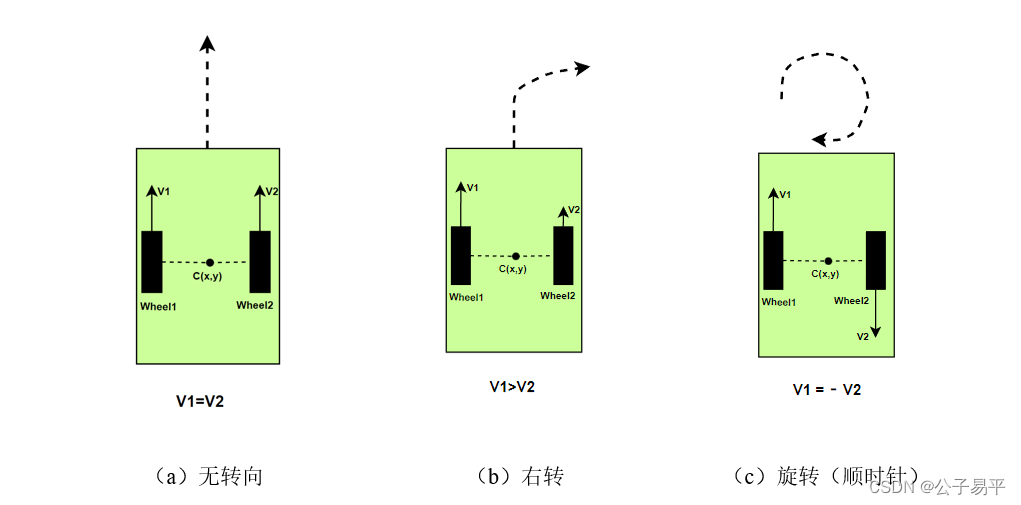
根据三种速度之间的关系,可以得到小车的三种转向状态。无转向状态,如下图所示,此时小车左右轮两侧方向大小均相等时。根据上式,此时小车的线速度即为每侧车轮的线速度。右转状态,如下图所示,此时小车左右两侧车轮的速度大小不同,但方向相同。根据上文的描述此时小车右转,且小车的线速度为左右两侧均值的一半。旋转状态,如下图所示,此时小车左右两侧车轮的速度大小相同,但方向相反。根据上式,此时小车的线速度为0,仅仅做旋转运动。
















 2356
2356











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











