










点云数据简介
点云数据(point cloud data)是指在一个三维坐标系统中的一组向量的集合。扫描资料以点的形式记录,每一个点包含有三维坐标,有些可能含有颜色信息(RGB)或反射强度信息(Intensity)。
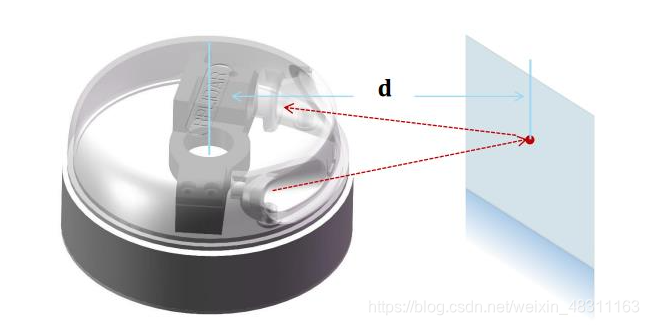
我们常用的点云数据为激光雷达采集的数据,激光雷达的非接触式测量特点,具有测量速度快、精度高、识别准确等优点,成为移动机器人定位导航的核心传感器。在激光雷达技术领域中,目前主要通过三角测距法与TOF方法来进行测距,其中三角法测距激光雷达主要是通过摄像头的光斑成像位置来解三角形的。
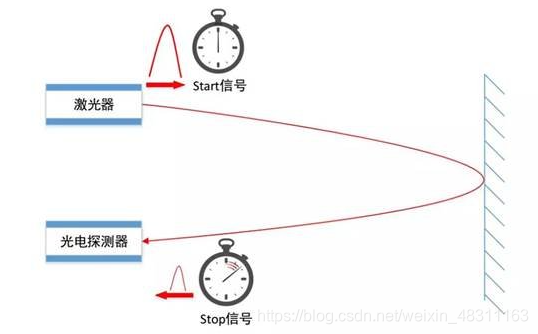
激光雷达常用测距方法为TOF(Time of flight),也就是根据激光的飞行时间来测距的
激光雷达每发射并接收一次,便可采集一个点的数据,我们把多个点数据并成为点云数据。点云数据与图像数据相比,本质区别在于图像为张氏数据,及有明确的维度、坐标、排列三顺序。但是点云数据没有,点云数据可以理解为一列列零散的点组成的。
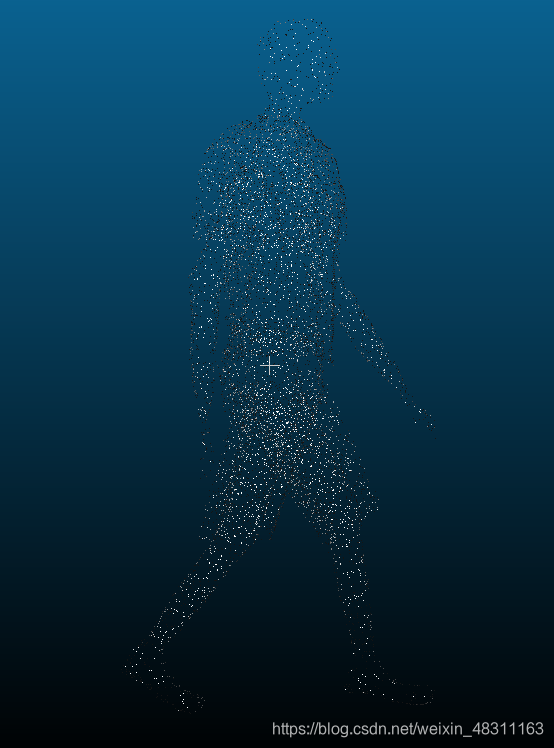
上图为使用CloudCompare工具将点云数据进行可视化

CloudCompare安装参考下面这篇博客
https://blog.csdn.net/weixin_42162528/article/details/88841578
点云数据的应用
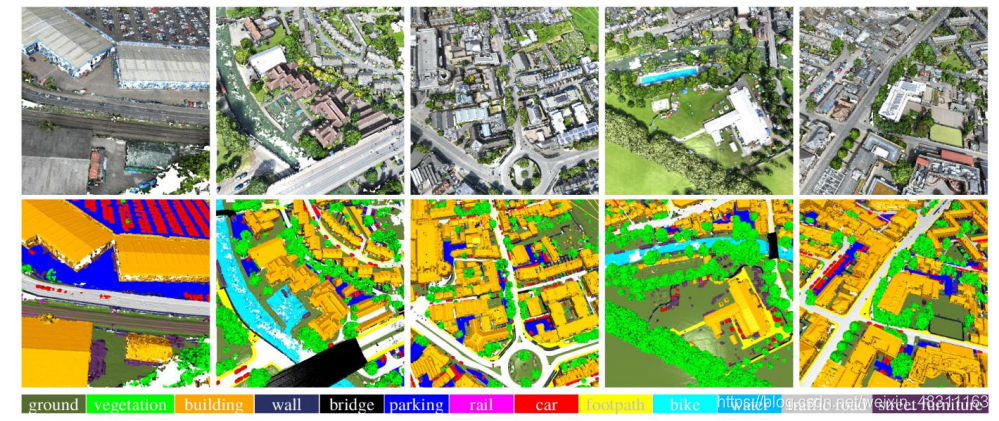
1、点云分割
2、点云补全
整体来说为一个编码解码网络

3、点云生成
很多算法和软件都是基于深度学习将无人机图像做成3D点云

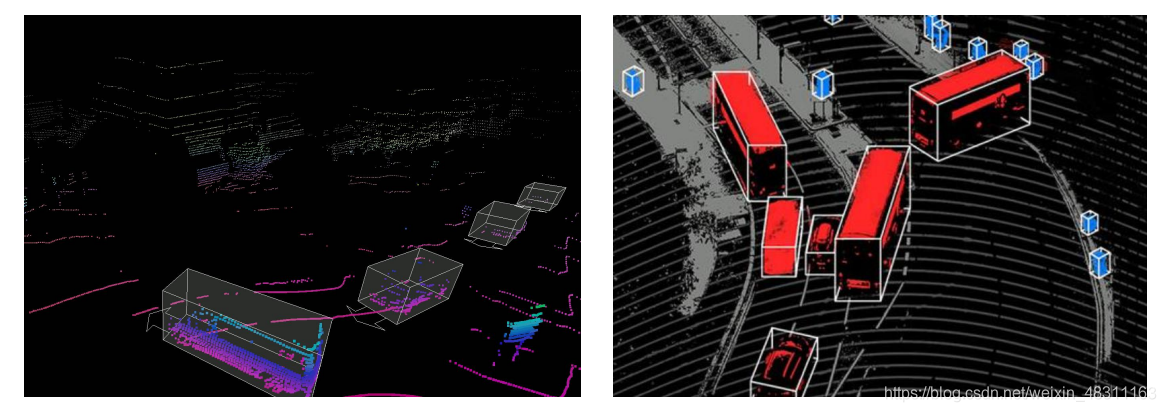
4、点云目标检测
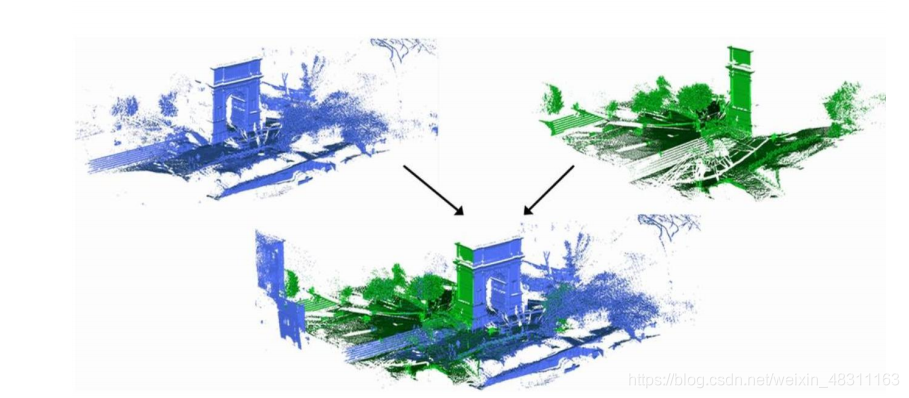
5、点云配准
医学与地图构建中经常会使用到,可以当做是很多项目的基础支撑

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









