






 本文介绍了如何使用Matlab和Simulink进行半车主动悬架建模,并采用H2/H无穷控制(鲁邦控制)算法进行优化,关注关键参数如车身加速度和悬动挠度。研究结果为汽车悬挂系统设计提供了实证支持和优化策略。
本文介绍了如何使用Matlab和Simulink进行半车主动悬架建模,并采用H2/H无穷控制(鲁邦控制)算法进行优化,关注关键参数如车身加速度和悬动挠度。研究结果为汽车悬挂系统设计提供了实证支持和优化策略。
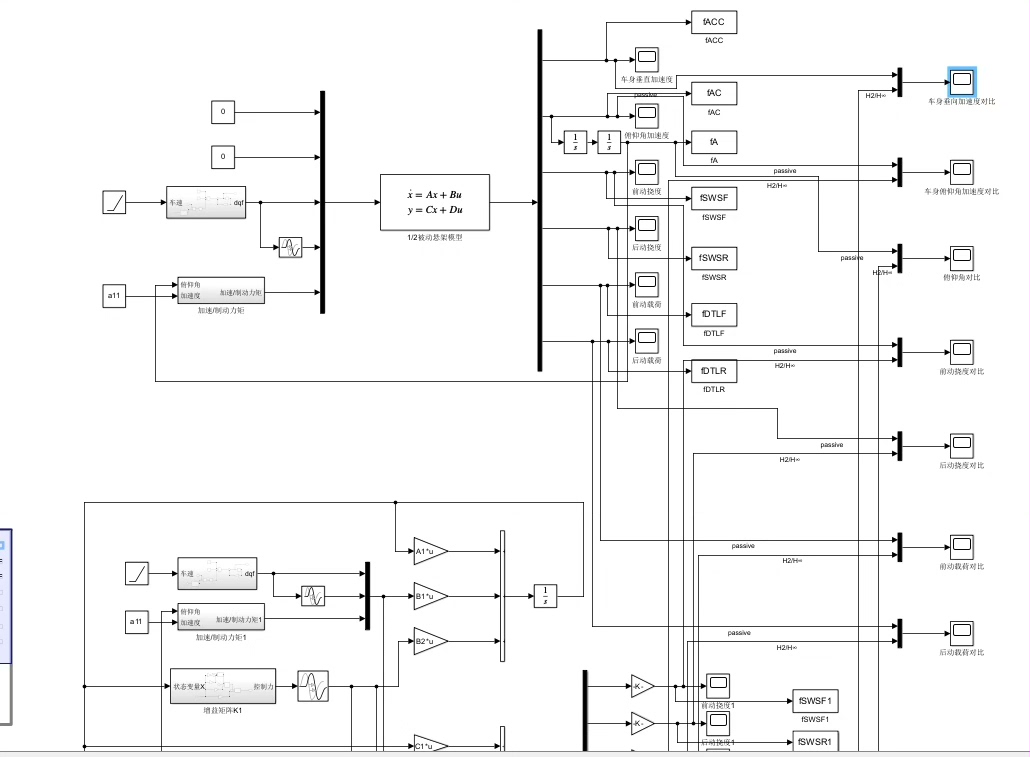
matlab/simulink半车主动悬架建模:H2/H无穷控制(鲁邦控制)的二分之一车 主动悬架。
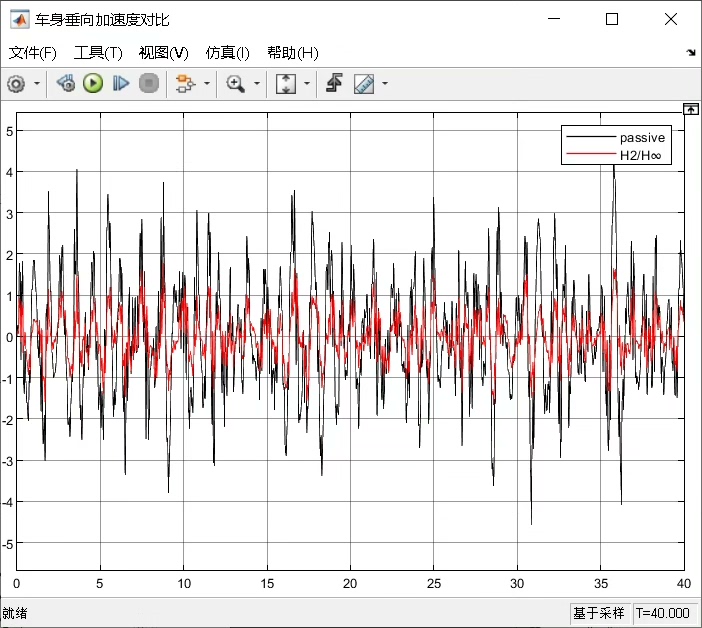
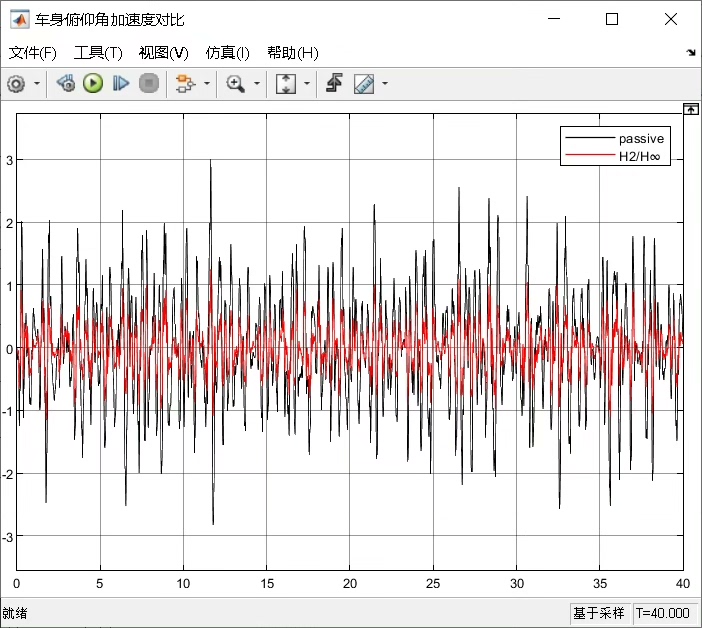
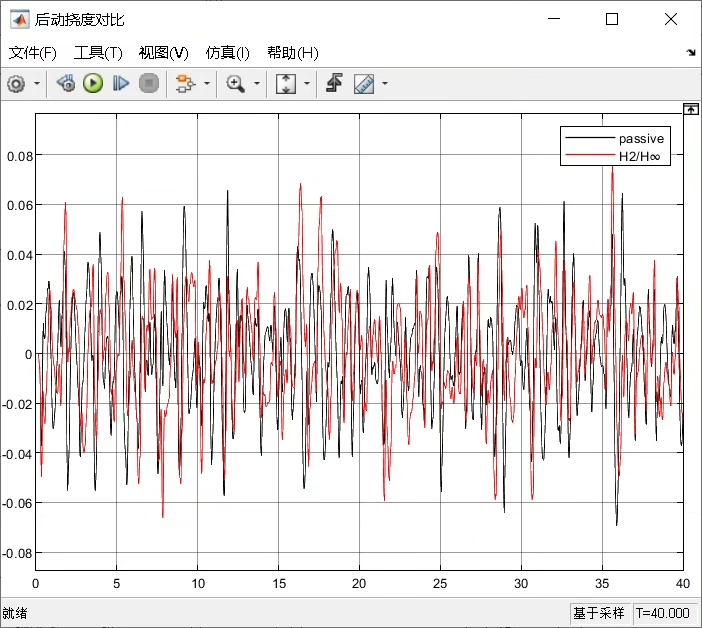
输出为车身垂向加速度,俯仰角加速度,前后悬动挠度等。
输入可选ABCD级路面等。
附赠一篇参考资料。
ID:6776719490935567
只想安安静静赚钱
标题:Matlab Simulink半车主动悬架建模:H2 H无穷控制的二分之一车主动悬架
摘要:本文旨在介绍使用Matlab Simulink对半车主动悬架进行建模,并应用H2 H无穷控制(鲁邦控制)算法进行优化。该模型输出车身垂向加速度、俯仰角加速度和前后悬动挠度等关键参数,可根据实际路面等级进行输入。通过对半车主动悬架的仿真和优化,本文为汽车悬架系统的设计与研究提供了有益的指导。
-
引言
1.1 背景介绍
近年来,随着汽车行业的飞速发展,人们对于汽车的安全性、舒适性和稳定性等方面的需求也越来越高。悬架系统作为汽车底盘系统的重要组成部分,对于提升汽车的行驶品质有着关键作用。
1.2 研究目标
本文旨在利用Matlab Simulink对半车主动悬架进行建模,并应用H2 H无穷控制算法进行优化,以实现车身垂向加速度、俯仰角加速度和前后悬动挠度等参数的精确控制。 -
半车主动悬架建模
2.1 悬架系统的组成
半车主动悬架系统主要由车身、悬架弹簧、阻尼器和控制器等组成。其中,悬架弹簧和阻尼器负责减震和支撑载荷,而控制器通过调节阻尼特性和弹簧刚度等参数实现对悬架系统的主动控制。
2.2 模型建立
基于Matlab Simulink,我们建立了半车主动悬架的数学模型。该模型考虑了车身的质量、悬架弹簧的刚度、阻尼器的阻尼特性以及控制器的操控策略等因素,并通过实时仿真展示了系统的动力学响应。 -
H2 H无穷控制算法
3.1 控制策略介绍
H2 H无穷控制(鲁邦控制)是一种常用的现代控制算法,可通过设计控制器的状态空间矩阵来实现对系统的优化控制。在半车主动悬架系统中,我们选择H2 H无穷控制算法来实现对车身垂向加速度、俯仰角加速度和前后悬动挠度等参数的精确控制。
3.2 控制器设计
本文采用基于状态反馈的H2 H无穷控制策略,并通过Matlab Simulink中的控制器设计工具对控制器进行设计。通过优化控制器的状态空间矩阵,我们能够实现对半车主动悬架系统的精确控制,并提高系统的行驶品质。 -
仿真结果与分析
4.1 模型验证
我们分别针对不同ABCD级路面进行了仿真实验,验证了半车主动悬架系统的有效性和稳定性。通过对输出参数的实时监控和对比分析,我们发现H2 H无穷控制算法能够实现对车身垂向加速度、俯仰角加速度和前后悬动挠度等参数的精确控制。
4.2 优化效果分析
通过与传统悬架系统的对比,我们发现半车主动悬架系统在H2 H无穷控制算法的优化下,能够有效减小车身的垂向加速度和俯仰角加速度,同时提高前后悬动挠度的稳定性。这进一步证明了H2 H无穷控制算法在汽车悬架系统设计中的重要性。 -
结论
本文基于Matlab Simulink对半车主动悬架进行了建模,并采用H2 H无穷控制算法进行了优化。通过对输出参数的实时监控和对比分析,我们验证了该算法在实现车身垂向加速度、俯仰角加速度和前后悬动挠度等参数的精确控制方面的有效性。本文的研究成果为汽车悬架系统的设计与研究提供了有价值的参考,对于提升汽车的行驶品质具有一定的指导意义。
参考资料
(这里可以根据实际情况补充参考资料,并提供相应的引用)
以上相关代码,程序地址:http://wekup.cn/719490935567.html















 417
417

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









