






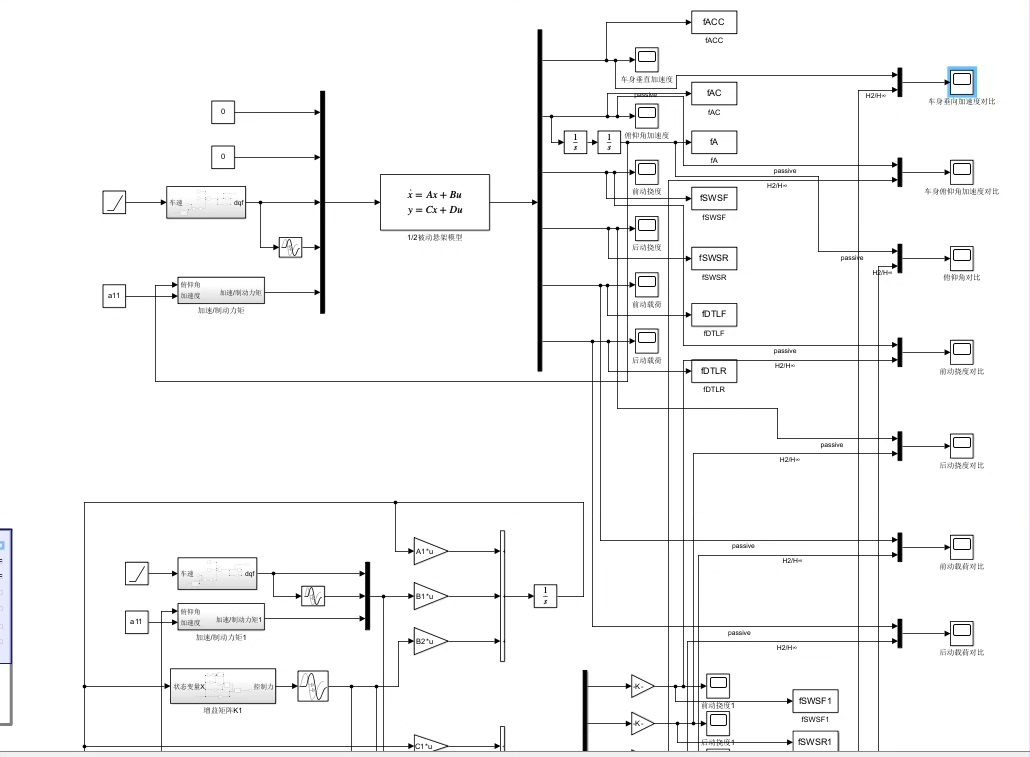
matlab/simulink半车主动悬架建模:基于ADRC(自抗扰控制)的主动悬架控制。
主体模型为半车主动悬架,采取ADRC控制。
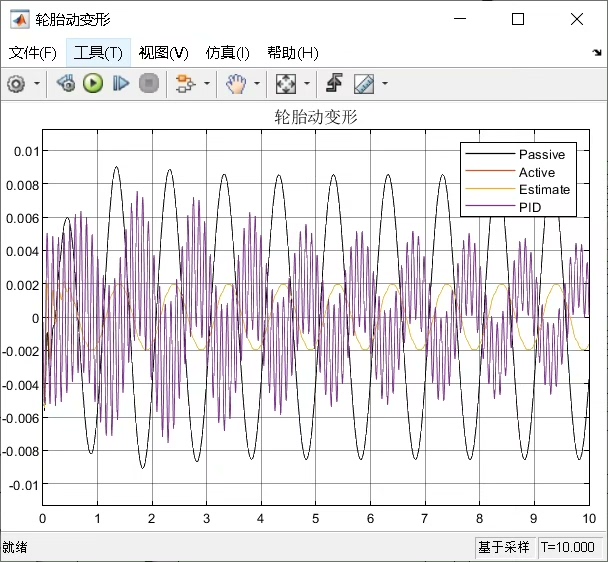
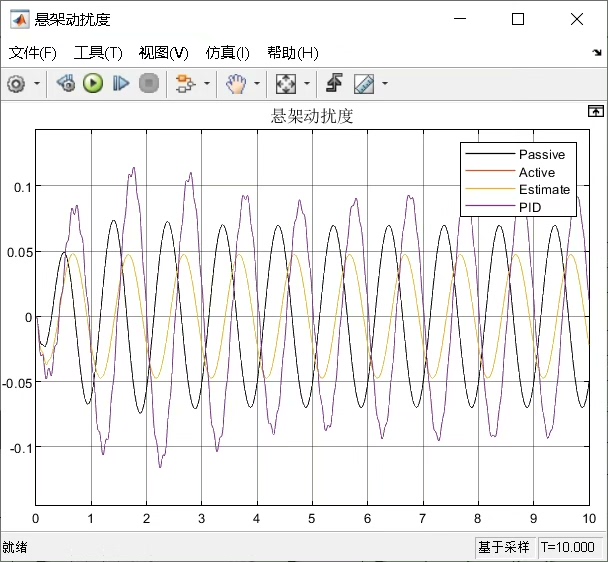
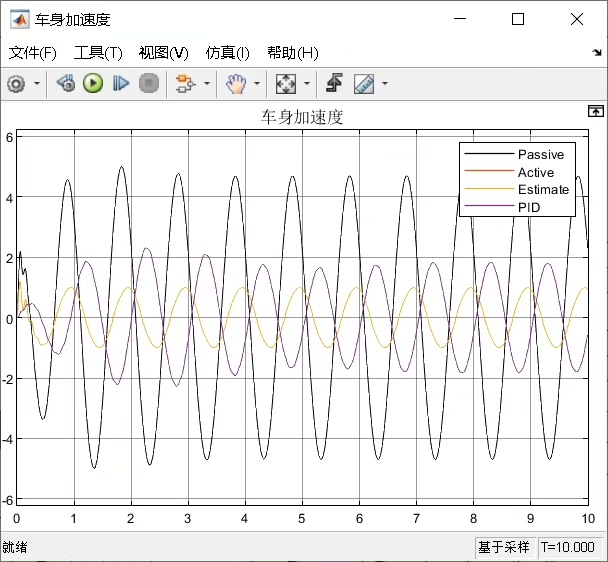
输出为车身加速度,悬架动挠度,轮胎动变形。
默认输入为正弦路面输入。
有与pid控制的效果对比。
ID:2476719124689352
只想安安静静赚钱
Title: 基于ADRC的MATLAB Simulink半车主动悬架建模及控制效果对比
Abstract: 本文基于自抗扰控制(ADRC)的思想,以MATLAB Simulink为工具,对半车主动悬架进行了建模与控制。主要输出参数包括车身加速度、悬架动挠度和轮胎动变形,并与传统PID控制方案进行了效果对比。文章通过详细分析与实验结果的对比,展示了ADRC在主动悬架控制中的优越性。
-
引言
1.1 背景和研究意义
1.2 相关工作综述
1.3 本文的研究目的和内容概述 -
半车主动悬架建模
2.1 悬架系统的结构与工作原理
2.2 基于物理原理的建模方法
2.3 基于数学建模的方法
2.4 建模结果及验证 -
ADRC控制器设计
3.1 自抗扰控制(ADRC)原理介绍
3.2 ADRC在半车主动悬架中的应用
3.3 控制器参数的选择与调整
3.4 控制器设计流程与实现 -
对比实验设置
4.1 实验平台与硬件搭建
4.2 性能评价指标的选择
4.3 实验输入信号的设计与加载
4.4 实验方案的设计与实施 -
实验结果与分析
5.1 PID控制器的效果对比
5.2 ADRC控制器的效果对比
5.3 控制效果的定量分析与评价
5.4 结果讨论与分析 -
结论
6.1 主要研究成果总结
6.2 对ADRC在主动悬架控制中的应用前景展望
6.3 存在的问题与改进方向 -
参考文献
注意:以上仅为一个文章的大致结构,每个章节可进一步细化,根据实际需要进行拓展。请尽量避免直接拷贝与重复使用给定的短语和关键词,以保证文章的原创性和技术性。
【相关代码,程序地址】:http://fansik.cn/719124689352.html
















 457
457











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









