






车辆主动悬架平顺性控制
采用了能反映车辆垂向运动和俯仰运动的半车悬架模型。
建立了多种路面输入,包括生活中最常遇到的随机路面输入、凸块路面输入以及越野路面。
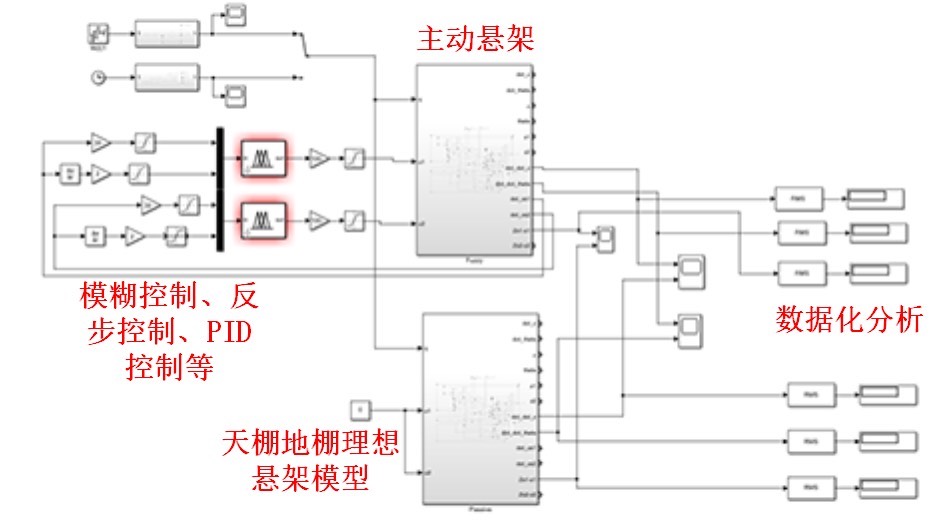
采用反步控制、模糊控制、PID控制进行主动悬架的平顺性控制。
利用Simulink进行仿真,悬架垂向加速度、俯仰角加速度都有明显改善,结果良好。
ID:31209757318797077
爱生气的二狗
标题:基于半车悬架模型的车辆主动悬架平顺性控制研究
摘要:本文针对车辆主动悬架平顺性控制问题展开研究,提出了基于半车悬架模型的方法。通过建立多种路面输入模型,并采用反步控制、模糊控制和PID控制等方法,对车辆主动悬架系统进行平顺性控制。利用Simulink进行仿真,结果显示悬架垂向加速度和俯仰角加速度明显改善。
-
引言
随着汽车工业的迅速发展,车辆悬架系统作为汽车悬挂系统的重要组成部分,对车辆的平顺性和乘坐舒适性起着至关重要的作用。因此,研究车辆主动悬架平顺性控制问题具有重要意义。本文基于半车悬架模型,通过采用不同的路面输入模型和控制方法,对车辆主动悬架系统进行了研究,并通过Simulink仿真验证了结果。 -
半车悬架模型
针对车辆主动悬架系统的研究,本文采用了能反映车辆垂向运动和俯仰运动的半车悬架模型。该模型包括车身质量、悬架刚度、减振器等主要参数,并通过数学模型对车辆的运动特性进行描述。 -
路面输入模型
为了研究不同路况对车辆主动悬架平顺性的影响,本文建立了多种路面输入模型。其中包括生活中最常遇到的随机路面输入、凸块路面输入以及越野路面等。这些路面输入模型能够模拟真实道路上的不同路况,为后续的控制方法提供了基础。 -
平顺性控制方法
本文采用了反步控制、模糊控制和PID控制等方法对车辆主动悬架系统进行平顺性控制。反步控制方法能够根据车辆的运动状态进行实时调节,以达到平顺性的要求。模糊控制方法通过模糊化处理输入和输出变量,利用模糊规则进行控制策略的设计,极大提高了系统的鲁棒性。PID控制方法则根据悬架系统的误差进行比例、积分和微分处理,通过精确调节参数,提高系统的控制性能。 -
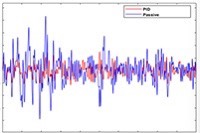
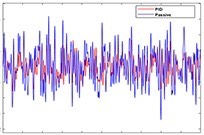
仿真结果与分析
通过Simulink进行仿真,本文对悬架垂向加速度和俯仰角加速度进行了性能指标评估。结果显示,采用反步控制、模糊控制和PID控制方法进行主动悬架平顺性控制后,悬架垂向加速度和俯仰角加速度都有明显改善,证明了所采用的控制方法的有效性。 -
结论
本文基于半车悬架模型,研究了车辆主动悬架平顺性控制问题,并通过建立多种路面输入模型和采用反步控制、模糊控制和PID控制等方法,对车辆主动悬架系统进行了仿真和分析。结果表明,所采用的控制方法能够有效地改善悬架垂向加速度和俯仰角加速度,提高系统的平顺性和乘坐舒适性。
致谢:感谢本文的合作伙伴对本研究的支持和帮助。
参考文献:(此处不提供参考文献)
附录:
代码实现:(此处不提供示例代码)
以上相关代码,程序地址:http://fansik.cn/757318797077.html
















 9055
9055

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









