







ROS计算图级
上一节说到一个 package 可以包含多个可执行文件(节点),可执行文件需要被运行,就要了解ROS的通信架构,也就是计算图级,例:

小萝卜机器人拥有驱动系统,感知系统,控制系统等,要让它从指定位置到另一位置一定得启动多个节点,计算图级展示了 ROS 如何对这些节点进行管理和通信的。
计算图级结构如下:
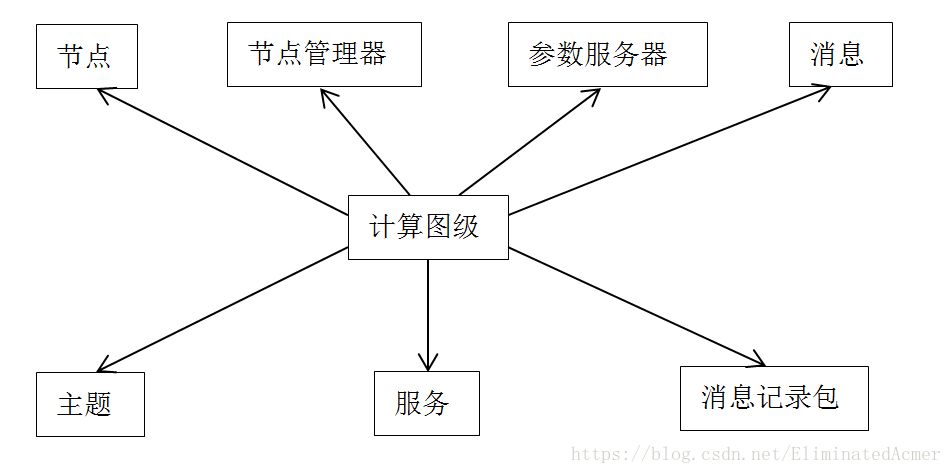
节点管理器(master)和节点(node)
在 ROS 中要管理节点和进程,需要一个节点管理器,它的名称是 master,它的存在有两个作用:
1.每个节点启动时都必须向它注册
2.master管理节点(node)间的通信
因此,在启动节点前,需要使用 roscore 命令启动 master,roscore 还顺带启动了 rosout(日志输出) 和 parameter server(参数服务器)
rosout 也是一个节点,负责记录当前系统中的 error 或 warning 信息,parameter server 则是做一些参数配置。
这里再介绍一下节点(node),一个 node 就是一个进程,进程就是程序的一次执行,因此节点只是 ROS 对进程的专有称呼,接下来介绍一些实例:
首先安装一个模拟器,用你使用的ROS发行版本名称(例如electric、fuerte、groovy、hydro等)替换掉'<distro>'
sudo apt-get install ros-<distro>-ros-tutorials开启一个终端,运行
roscore< 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章















 1698
1698











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









