






MPU9250 九轴 EKF扩展卡尔曼滤波数据融合算法
短时间内我们相信陀螺仪,长时间内我们可以相信加速度计。
使用扩展卡尔曼滤波(EKF)将数据融合。
选取状态量为四元数和三轴陀螺仪的漂移 控制量为陀螺仪采样值 观测量为 三轴加速度计和磁偏角

MPU9250 九轴 EKF扩展卡尔曼滤波数据融合算法
摘要: 本文主要讨论了在物体运动的实时监测和导航系统中,利用MPU9250九轴传感器和EKF(扩展卡尔曼滤波)算法进行数据融合的方法。在短时间内,我们相信陀螺仪;而在长时间内,我们可以相信加速度计。为了更准确地估计物体的姿态和位置,需采用EKF将陀螺仪和加速度计的数据进行融合。本文将介绍EKF算法的原理、应用场景以及数据融合的具体方法。
-
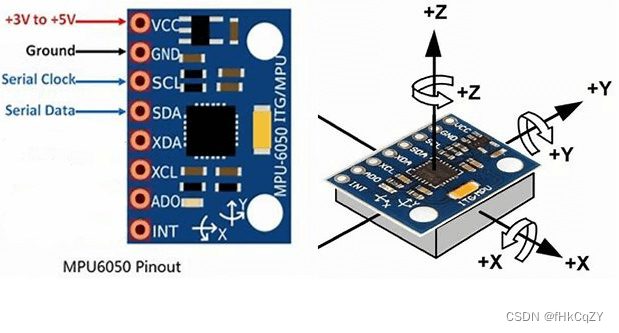
引言 随着物联网和智能设备的快速发展,对于物体的实时监测和导航需求越来越大。而MPU9250九轴传感器作为一种常用的姿态传感器,能够同时测量物体的加速度、角速度和磁场强度等信息,因此在姿态估计和运动跟踪等领域具有广泛的应用。
-
扩展卡尔曼滤波(EKF)算法原理 EKF算法是一种基于贝叶斯滤波的状态估计方法,通过不断地更新状态量和观测量之间的关系,实现对系统状态的估计。在姿态估计中,EKF算法通过利用陀螺仪的测量值来迭代地估计姿态的变化,并利用加速度计的测量值来校正陀螺仪的漂移。
-
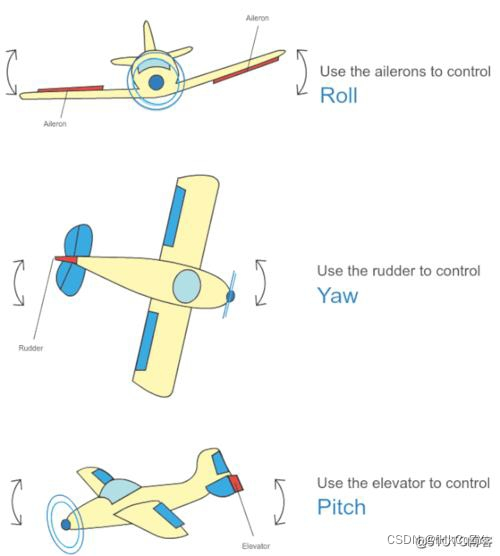
MPU9250九轴传感器在姿态估计中的应用 MPU9250九轴传感器能够提供物体的加速度、角速度和磁场强度等信息。在姿态估计中,通过对陀螺仪的角速度进行积分,可以得到物体的姿态变化;而加速度计可以提供物体的重力方向。通过结合这两个传感器的数据,可以实现对物体姿态的准确估计。
-
数据融合的具体方法 在数据融合过程中,首先需要选择状态量和控制量。在本文中,我们选择四元数和陀螺仪的漂移作为状态量,以及陀螺仪的采样值作为控制量。然后,选择三轴加速度计和磁偏角作为观测量。通过EKF算法的迭代更新,可以估计出物体的姿态和位置信息。
-
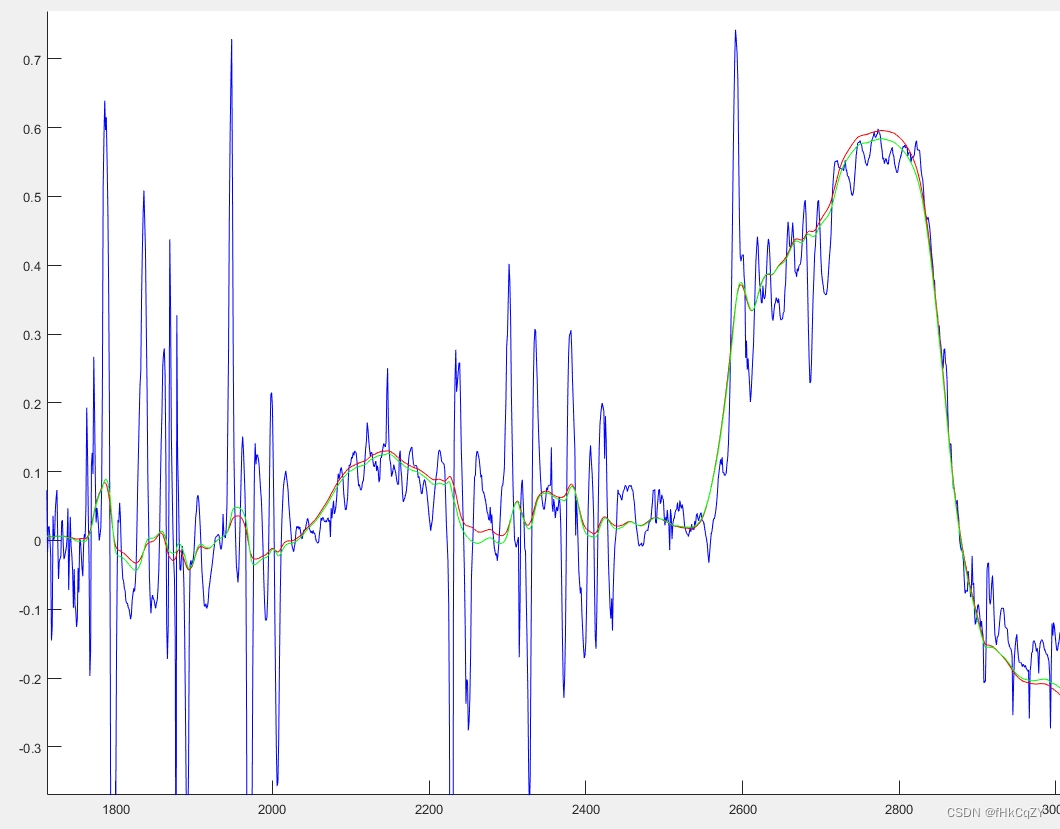
实验与结果分析 为了验证所提方法的有效性,我们进行了一系列实验。实验结果表明,在使用MPU9250九轴传感器和EKF算法进行数据融合的情况下,可以实现对物体姿态的准确估计。同时,该方法对于陀螺仪的漂移具有一定的校正作用,提高了姿态估计的准确性。
-
结论 本文介绍了利用MPU9250九轴传感器和EKF算法进行数据融合的方法。通过结合陀螺仪和加速度计的数据,可以实现对物体姿态的准确估计。实验结果表明,所提方法具有较好的效果,在物体运动的实时监测和导航系统中具有广泛的应用前景。
关键词:MPU9250;九轴传感器;EKF算法;数据融合;姿态估计;陀螺仪;加速度计;实时监测;导航系统
相关代码,程序地址:http://imgcs.cn/lanzoun/673825536274.html















 7533
7533











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









