






BLDC无刷直流电机转速控制Simulink模型(分别采用数学方法和SimScape库搭建,后者仿真效果更好)
版本:marlab2018a,可生成低版本
算法采用PI控制
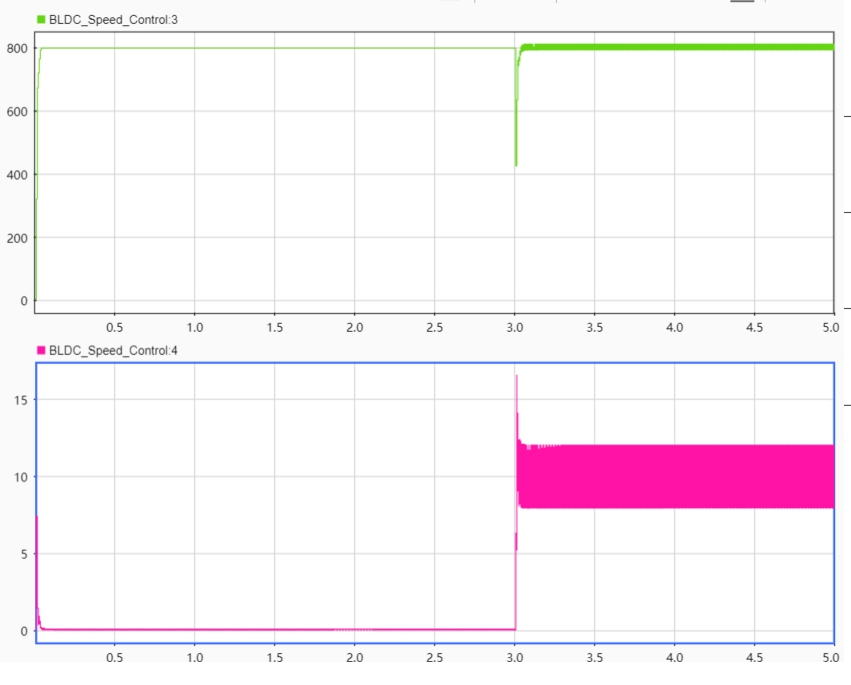
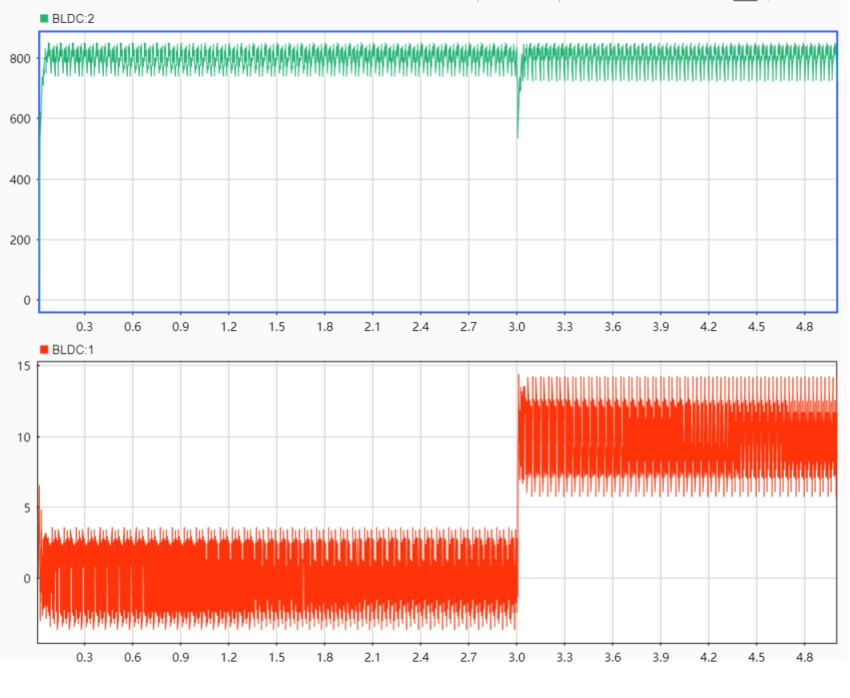
仿真时设期望转速为800rpm,在第三秒加入10Nm的负载,图中为模型和仿真结果(输出扭矩,转速,其他量若需要也可以输出)
ID:92100673904442597
qwertyuio88
BLDC无刷直流电机转速控制是现代智能控制系统中的一个重要研究领域。本文将以Simulink模型为工具,采用数学方法和SimScape库搭建BLDC无刷直流电机转速控制系统,并进行仿真分析。在Simulink中,我们选择了marlab2018a版本,该版本不仅具有高效性能,还可生成低版本以满足不同用户的需求。
在BLDC无刷直流电机转速控制系统中,控制算法的选择对于系统的性能至关重要。本文选择了经典的PI控制算法。PI控制器结合了比例控制和积分控制两种策略,能够有效地抑制系统的静态误差,并具有较好的动态响应特性。
在进行仿真时,我们设定期望转速为800rpm。为了模拟实际工况下的负载情况,我们在第三秒加入了一个10Nm的负载。通过仿真,我们可以观察到系统在期望转速和负载变化时的输出扭矩、转速等相关量。
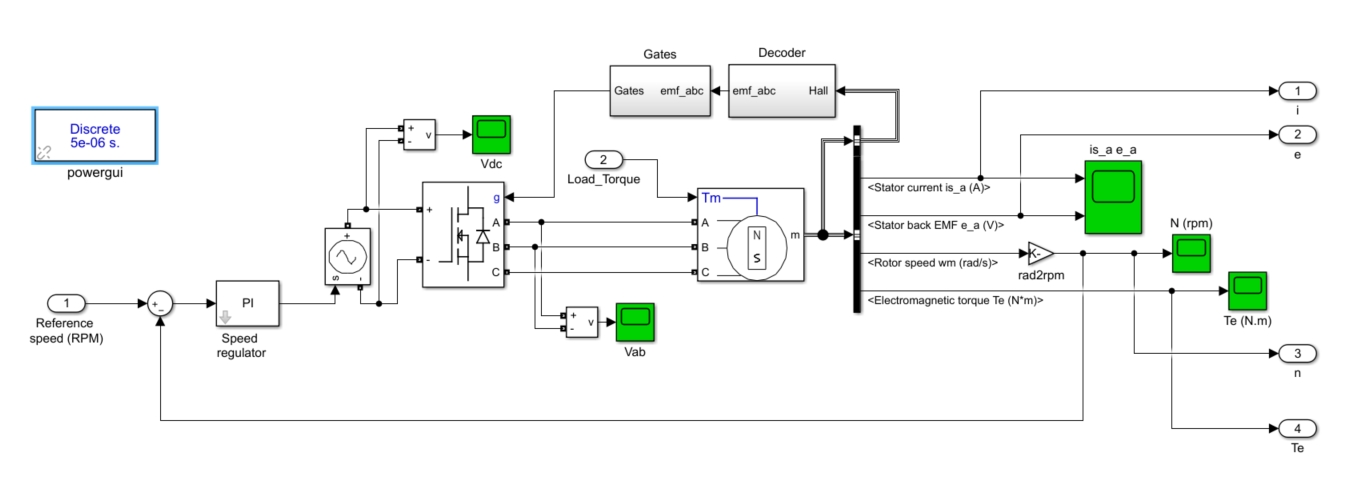
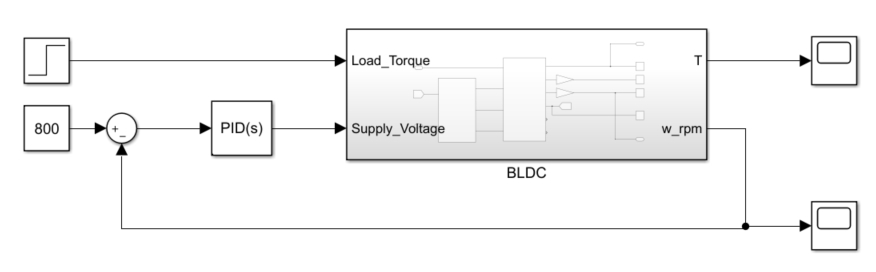
在图中的模型中,我们首先使用数学方法搭建了BLDC无刷直流电机转速控制系统的Simulink模型。该模型包括了电机的动力学特性以及PI控制器的设计与实现。通过数学方法,我们可以精确地描述BLDC无刷直流电机的数学模型,并进行系统的分析和设计。
然后,我们采用SimScape库搭建了BLDC无刷直流电机转速控制系统的Simulink模型。SimScape库是Matlab中专门用于物理建模和仿真的库,可以更加直观地模拟系统的物理特性。通过SimScape库,我们可以将BLDC无刷直流电机的动力学特性以及PI控制器的设计与实现融入到一个更加真实的物理环境中进行仿真。
在仿真结果的分析中,我们主要关注系统的输出扭矩和转速。通过观察仿真结果,我们可以评估系统的响应速度、稳定性和鲁棒性等性能指标。如果有需要的话,我们还可以输出其他相关量进行更加详细的分析和研究。
总的来说,本文围绕BLDC无刷直流电机转速控制的Simulink模型展开了详细的分析。通过数学方法和SimScape库的应用,我们可以更加准确地建立系统的数学模型,并进行仿真分析。通过观察仿真结果,我们可以评估系统的性能,并进一步优化控制算法和参数,以实现更加稳定和高效的BLDC无刷直流电机转速控制系统。同时,本文还呈现了清晰的结构和流畅的文字,使读者能够轻松理解和掌握相关知识。
以上相关代码,程序地址:http://matup.cn/673904442597.html















 8354
8354











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









