







函数:
CVAPI(void) cvFloodFill( CvArr* image, CvPoint seed_point,
CvScalar new_val, CvScalar lo_diff CV_DEFAULT(cvScalarAll(0)),
CvScalar up_diff CV_DEFAULT(cvScalarAll(0)),
CvConnectedComp* comp CV_DEFAULT(NULL),
int flags CV_DEFAULT(4),
CvArr* mask CV_DEFAULT(NULL));//image为待处理图像,seed_point为种子坐标,new_val为填充值,lo_diff为像素值的下限差值,up_diff为像素值的上限差值
从函数形式可看出,该函数可处理多通道图像。
mask为掩码, 注意: 设输入图像大小为width * height, 则掩码的大小必须为 (width+2) * (height+2) , mask可为输出,也可作为输入 ,由flags决定
flags参数 : 0~7位为0x04或者0x08 即 4连通或者8 连通
8~15位为填充mask的值大小 , 若为0 , 则默认用1填充
16~23位为 :
CV_FLOODFILL_FIXED_RANGE =(1 << 16),
CV_FLOODFILL_MASK_ONLY =(1 << 17)
flags参数通过位与运算处理
当为CV_FLOODFILL_FIXED_RANGE 时,待处理的像素点与种子点作比较,如果满足(s - lodiff , s + updiff)之间(s为种子点像素值),则填充此像素 . 若无此位设置,则将待处理点与已填充的相邻点作此比较
CV_FLOODFILL_MASK_ONLY 此位设置填充的对像, 若设置此位,则mask不能为空,此时,函数不填充原始图像img,而是填充掩码图像. 若无此位设置,则在填充原始图像的时候,也用flags的8~15位标记对应位置的mask.
处理的图片为:
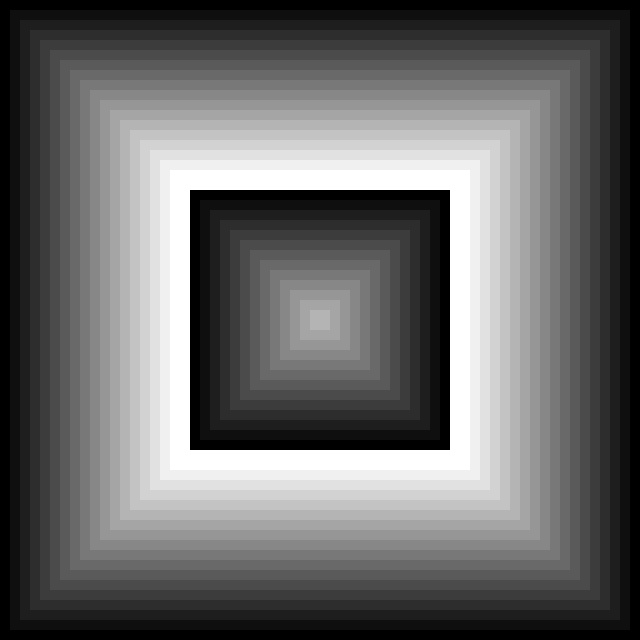
图片的每相邻像素值差为15 , 总大小为640*640
程序:
#include <cv.h>
#include <cxcore.h>
#include <highgui.h>
#include <highgui.h>
#include <iostream>
using namespace std;
int main()
{
cvNamedWindow("source");
cvNamedWindow("dest1");
cvNamedWindow("dest2");
cvNamedWindow("mask0");
cvNamedWindow("mask1");
IplImage * src = cvLoadImage("f:\\images\\test.jpg");
IplImage * img=cvCreateImage(cvGetSize(src), 8, 3);
IplImage *img2=cvCreateImage(cvGetSize(src),8,3);
IplImage *pMask = cvCreateImage(cvSize(src->width +2 ,src->height +2),8,1);
cvSetZero(pMask);
cvCopyImage(src, img);
cvCopyImage(src,img2);
cvFloodFill(
img,
cvPoint(300,310),
CV_RGB(255,0,0),
cvScalar(20,30,40,0),
cvScalar(5,30,40,0),
NULL,
CV_FLOODFILL_FIXED_RANGE | (0x9f<<8),
pMask
);
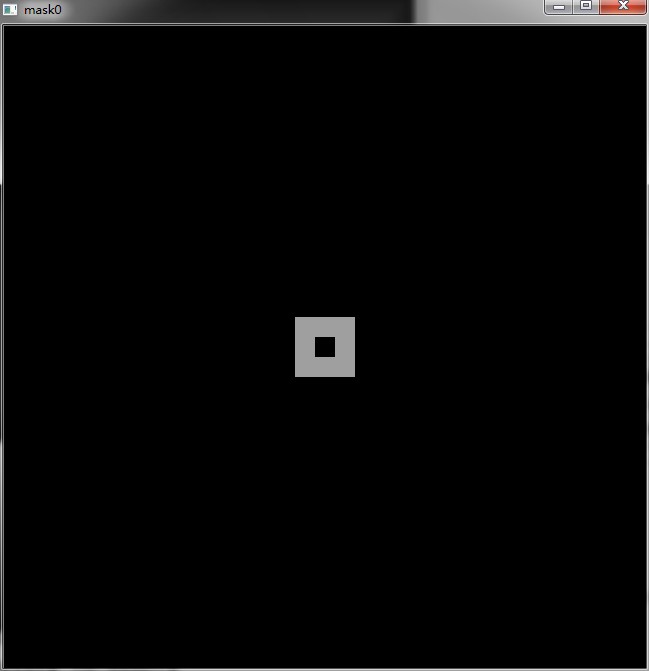
cvShowImage("mask0",pMask);
cvSetZero(pMask);
cvFloodFill(
img2,
cvPoint(80,80),
CV_RGB(255,0,0),
cvScalarAll(29),
cvScalarAll(10),
NULL,
CV_FLOODFILL_MASK_ONLY | (47<<8) ,
pMask
);
cvShowImage("source",src);
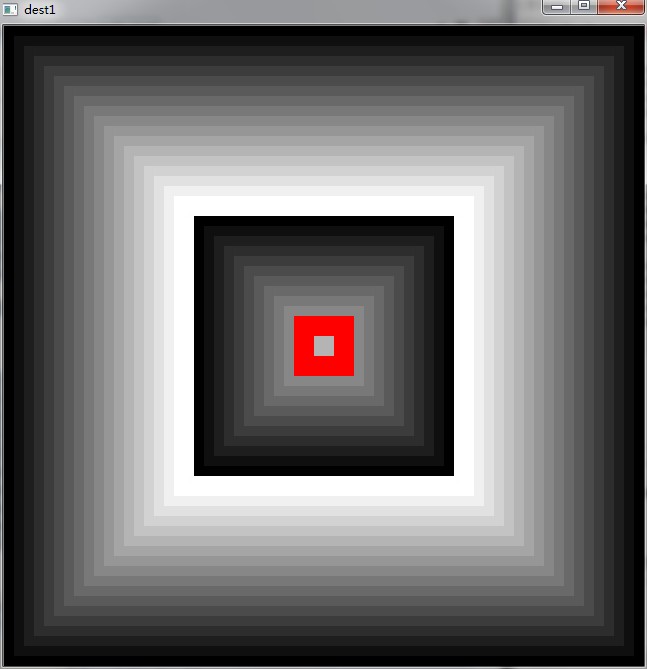
cvShowImage("dest1", img);
cvShowImage("dest2",img2);
cvShowImage("mask1",pMask);
cvWaitKey(0);
cvReleaseImage(&src);
cvReleaseImage(&img);
cvReleaseImage(&img2);
cvReleaseImage(&pMask);
cvDestroyAllWindows();
return 0;
}结果:

















 2796
2796

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









