







需要更新【pyecharts】
pip install pyecharts_snapshot
pip install -i https://pypi.tuna.tsinghua.edu.cn/simple pyecharts==0.5.11
创建【demo8.py】作为测试类

输入以下编码:
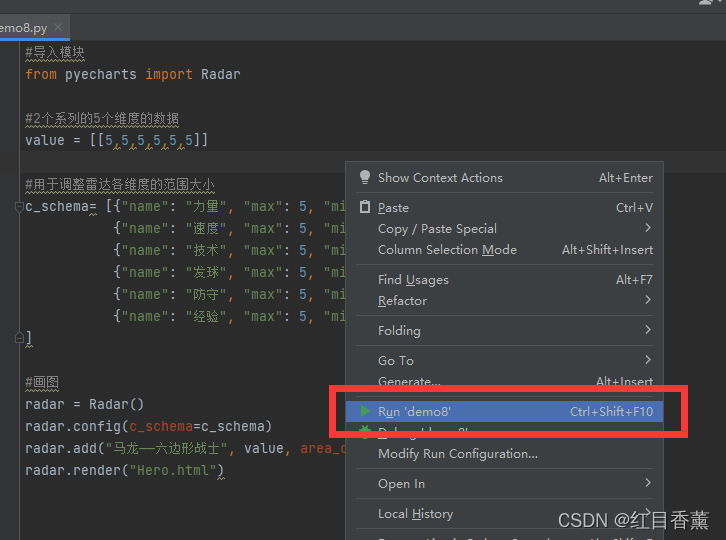
#导入模块
from pyecharts import Radar
#2个系列的5个维度的数据
value = [[5,5,5,5,5,5]]
#用于调整雷达各维度的范围大小
c_schema= [{"name": "力量", "max": 5, "min": -1},
{"name": "速度", "max": 5, "min": -1},
{"name": "技术", "max": 5, "min": -1},
{"name": "发球", "max": 5, "min": -1},
{"name": "防守", "max": 5, "min": -1},
{"name": "经验", "max": 5, "min": -1}
]
#画图
radar = Radar()
radar.config(c_schema=c_schema)
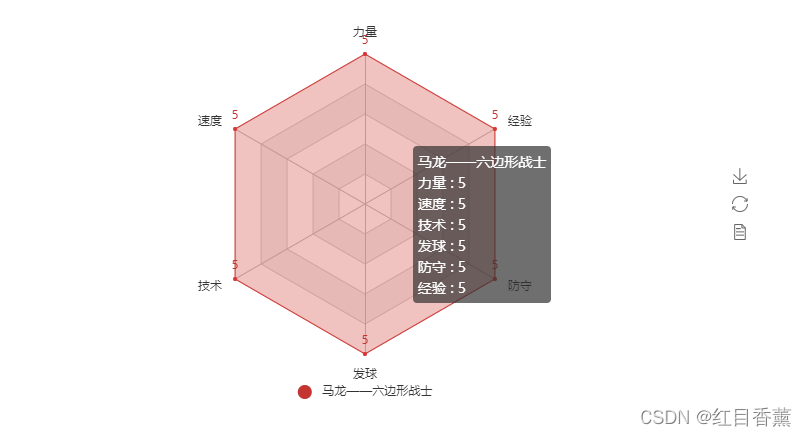
radar.add("马龙——六边形战士", value, area_opacity=0.3,legend_top='bottom')
radar.render("Hero.html")如果想加样式也有的
title_pos ='left'/center'/'right'标题位置,默认leftradar_text_size,雷达图标签文本字体大小item_color,该系列的颜色(此处体现为线条颜色)symbol =None,线条上的圆圈area_color,填充区域颜色area_opacity,填充区域透明度lengend_top='top'/'bottom',图例位置,默认toplengend_text_size,图例字体大小line_width,线条宽度
执行编译
打开生成的【Hero.html】
双击打开
效果
 希望能给大家带来一定帮助。
希望能给大家带来一定帮助。


















 5万+
5万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











