







 本文介绍了一个基于激光雷达的无人车人型识别项目,涵盖硬件驱动、数据聚类和模式识别三个阶段。硬件部分使用UTM-30LX-EW激光雷达,通过Java库实现驱动。数据聚类采用自定义方法,根据连续点间的距离差异进行分类。模式识别部分利用libsvm库,提取数据长度和曲率等特征进行学习和识别。
本文介绍了一个基于激光雷达的无人车人型识别项目,涵盖硬件驱动、数据聚类和模式识别三个阶段。硬件部分使用UTM-30LX-EW激光雷达,通过Java库实现驱动。数据聚类采用自定义方法,根据连续点间的距离差异进行分类。模式识别部分利用libsvm库,提取数据长度和曲率等特征进行学习和识别。
原文在这 finalobject.cn
这个项目是无人车里的一部分,完成激光雷达的驱动,数据采集然后后期的处理以及人型识别,并不涉及车辆硬件的控制。主要分三个大块讲吧,硬件驱动、数据聚类,以及模式识别,本来还想写一写UI部分的,但是感觉自己的UI写的其实蛮简陋的,所有还是不写了,对UI实现有兴趣的自己拔一下源代码吧。
github:https://github.com/finalObject/HumanDetectingOnLidar
这个项目是我大二时候写的,那时候还不会用github,版本记录都是直接备份实现的,所以在源代码里就会出现很多版本的项目,以最新的为准即可。然后里面files里还有一些项目中用到的硬件驱动库,型号资料。项目里有两个main类,带有radar的是连接雷达实时显示的,不带radar的,是把官方软件储存下来的数据文件作为数据来源。两者就是数据来源不一样。
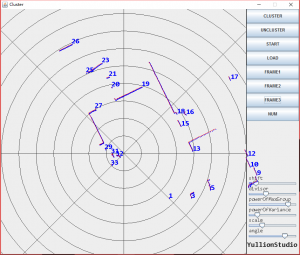
这是程序的截图
硬件驱动部分
使用的传感器
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









