







简介
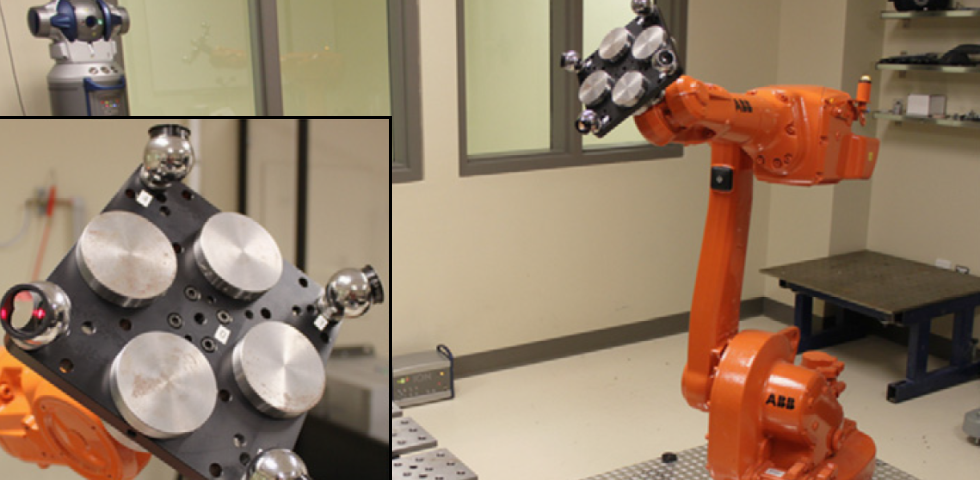
工业机器人具有很高的可重复性,但不准确,因此可以通过机器人校准来提高工业机器人的精度。机器人的标称精度取决于机器人的品牌和型号。通过机器人校准,您可以将机器人精度提高2到10倍。
(可选)球杆测试(循环测试)或ISO9283可以执行路径精度测试以快速验证机器人的精度。
Calibration Robot,校准机器人,是一种高度精确的自动化设备,用于校准其他机器人、测量仪器或制造设备,以确保它们的操作精度和可靠性。这种机器人通常配备有高精度的传感器和复杂的软件算法,可以检测和调整其他机器人的几何参数,从而提高生产效率和产品质量。
以下是对Calibration Robot的详细介绍:
一、定义与目的
机器人校准是指通过一系列测量、调整和优化过程,使机器人系统(包括机械结构、传感器、控制系统等)的实际性能与理论设计或期望性能相一致。其目的在于提高机器人的定位精度、重复定位精度、运动精度等关键指标,从而确保机器人在自动化生产、精密加工、机器人导航、自动化检测等领域中的稳定性和可靠性。
二、校准内容
机器人校准通常包括以下几个方面:
-
机械结构校准:包括机器人关节角度偏移、机器人框架偏移等参数的校准,以确保机器人机械结构的准确性和稳定性。
-
传感器校准:包括相机、激光扫描仪、陀螺仪、磁力计等传感器的校准。这些传感器在机器人系统中起着至关重要的作用,它们的精度直接影响到机器人的感知能力和决策能力。
-
手眼标定(HandEye Calibration):特指机器人手臂(即“手”)与视觉传感器(即“眼”)之间的标定。这种标定过程旨在消除两者之间的坐标系差异,使机器人能够在视觉引导下执行高精度的任务。
校准机器人的主要功能和应用包括:
机器人校准:
- 几何参数校准:调整机器人关节的位置、角度和长度等几何参数,确保实际物理尺寸与理论模型一致。
- 零点校准:设置一个已知的参考点,作为所有后续测量和运动的基础。
- 动态性能校准:优化机器人的加速度、速度和力矩等动态特性。
传感器校准:
- 校准视觉系统、力/扭矩传感器、位置传感器等,确保传感器输出的数据准确无误。
测量站校准:
- 在汽车生产线等环境中,校准光学测量设备、多轴测量机器人的轴和机器人与工件的对齐情况。
切割机器人校准:
- 校准激光或其他类型的切割机器人,以确保切割路径的准确性。
工业机器人空程误差校正:
- 校正工业机器人运动轴上的空程误差,提高机器人定位精度。
3D相机校准:
- 使用3D相机进行眼到手(Eye to Hand)校准,使机器人能够基于视觉信息做出精确的动作。
三、校准工具与技术
随着机器人技术的不断发展,涌现出了许多专业的机器人校准工具和技术。以下是一些典型的例子:
-
Robot Calibration Tools:这是一组高度灵活的校准工具,专注于简化相机与(工业)机器人之间的相互校准。它基于ROS生态系统,集成了OpenCV、TF等多种技术,能够支持多种应用场景,如手腕相机外参校准、工作单元中的静态相机校准等。
-
HandEye Calibration工具包:这是一个开源的、基于Python的工具包,用于进行机器人手臂与视觉传感器之间的标定。它采用了经典的张量重投影方法,通过最小化理论与实际测量间的误差来优化参数,支持多种常见的机器人和相机型号。
-
MATLAB工具箱:MATLAB平台也提供了多种机器人校准工具箱,如用于机器人运动学校准的通用多传感器Matlab工具箱等。这些工具箱通过组合多种校准方法,为通用机器人的多链校准提供了解决方案。
四、校准流程
机器人校准通常遵循以下流程:
-
数据捕获:从机器人系统中捕获必要的测量数据,包括关节角度、传感器读数等。
-
模型建立:根据机器人系统的物理特性和数学模型,建立相应的校准模型。
-
参数优化:利用优化算法对校准模型中的参数进行调整和优化,以最小化误差。
-
验证与调整:将优化后的参数应用到机器人系统中,并进行验证测试。根据测试结果进行必要的调整和优化。
-
结果输出:将校准结果输出到机器人系统的配置文件中,以便在实际应用中使用。
五、应用领域
机器人校准技术在多个领域都有广泛的应用,包括但不限于:
- 自动化生产线:提高生产效率和产品质量。
- 精密加工:确保加工精度和一致性。
- 机器人导航与避障:结合视觉传感器实现自主导航和避障。
- 自动化检测:如汽车行业的涂装或焊接环节中的精确操作。
- Advantest HS-910630 Tester Calibration robot
Calibration Robot作为机器人技术中的重要组成部分,对于提高机器人系统的精度和可靠性具有重要意义。随着技术的不断发展,未来将有更多先进的校准工具和技术涌现出来,为机器人技术的发展注入新的活力。



















 1479
1479

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











