







1. 多GPU数据并行简洁实现
一般来说, 𝑘 个GPU数据并行训练过程如下:
- 在任何一次训练迭代中,给定的随机的小批量样本都将被分成 𝑘 个部分,并均匀地分配到GPU上。
- 每个GPU根据分配给它的小批量子集,计算模型的损失和参数的梯度。
- 将 𝑘 个GPU中的局部梯度聚合,以获得当前小批量的随机梯度。
- 聚合梯度被重新分发到每个GPU中。
- 每个GPU使用这个小批量随机梯度,来更新它所维护的完整的模型参数集。
Pytorch框架通过nn.DataParallel()多GPU数据并行函数来实现将网络多GPU数据并行,得知使用了多少个GPU,同时将小批量数据平均分配到所有GPU上,然后计算loss和梯度,最后再把每个GPU上面的梯度聚合在一起,然后广播到所有GPU上面,进行网络参数权重更新,一行代码包含了上一节手动实现多GPU数据并行训练网络全部步骤,也即是上面所有步骤,如下面代码所示。
#获取所有的GPU
devices = [d2l.torch.try_gpu(i) for i in range(num_gpu)]
#网络初始化
resnet = resnet18(num_classes=10,in_channels=1)
# 在多个GPU上对模型进行数据并行
resnet = nn.DataParallel(module=resnet,device_ids=devices)
- 使用Pytorch框架的高级API实现多GPU数据并行,使用了比LeNet更复杂的网络ResNet18,跟之前使用的ResNet模型不同的是:开始时使用了更小的卷积核、步长和填充,而且删除了最大汇聚层。
def train(net,num_gpu,lr,batch_size,epochs):
train_iter,test_iter = d2l.torch.load_data_fashion_mnist(batch_size)
#获取所有GPU
devices = [d2l.torch.try_gpu(i) for i in range(num_gpu)]
#初始化网络权重参数
def init_weight(m):
if type(m) in [nn.Linear,nn.Conv2d]:
nn.init.normal_(m.weight,mean=0,std=0.01)
net.apply(init_weight)
# 在多个GPU对模型进行数据并行
net = nn.DataParallel(module=net,device_ids=devices)
net = net.to(devices[0])
optim = torch.optim.SGD(net.parameters(),lr=lr)
loss = nn.CrossEntropyLoss()
timer = d2l.torch.Timer()
animator = d2l.torch.Animator('epoch','test acc',xlim=[1,epochs])
for epoch in range(epochs):
net.train()#网络用于训练,必须有,因为模型中有batch_normalization层,batch_norm层在训练和测试两种状态下的权重参数不一样
timer.start()
for X,y in train_iter:
optim.zero_grad()
X = X.to(devices[0])#将输入数据和label都复制到第一个GPU上面
y = y.to(devices[0])
# 模型通过上面nn.DataParallel()多GPU数据并行函数得知使用了多少个GPU,同时将小批量数据平均分配到所有GPU上,然后计算loss和梯度,最后再把每个GPU上面的梯度聚合在一起,然后广播到所有GPU上面,进行网络参数权重更新
y_hat = net(X)
ls = loss(y_hat,y)
ls.backward()
optim.step()
timer.stop()
net.eval()#模型用于测试,必须有,因为模型中有batch_normalization层
animator.add(epoch+1,(d2l.torch.evaluate_accuracy_gpu(net,test_iter),))
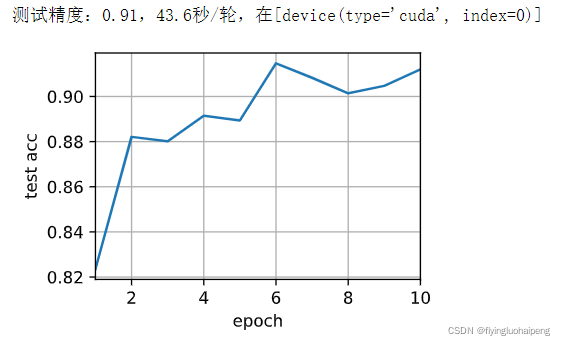
print(f'测试精度:{animator.Y[0][-1]:.2f},{timer.avg():.2f}秒/轮,在{str(devices)}')
- 模型训练和测试结果(学习率lr为0.1,轮数为10轮,批量大小为256个随机样本)
#网络初始化
resnet = resnet18(num_classes=10,in_channels=1)
lr,epochs,batch_size=0.1,10,256
num_gpu= 2 #本地只有一个GPU
train(resnet,num_gpu,lr,batch_size,epochs)
'''
补充:
#使用2个GPU进行训练,由于ResNet18比LeNet模型更复杂,因此多GPU数据并行效果更好,性能更高,每轮训练完所花的时间比使用一个GPU训练时间少了将近一半
train(net, num_gpus=2, batch_size=512, lr=0.2)#由于使用两个GPU数据并行训练,因此批量大小需要为一个GPU训练时两倍,学习率也要为一个GPU训练时的两倍
'''
在单个GPU上训练和测试结果如下图所示:
2. 多GPU数据并行简洁实现全部代码
import d2l.torch
import torch
from torch import nn
"""稍加修改的ResNet-18模型"""
def resnet18(num_classes,in_channels=1):
def Residul_Block(in_channels,out_channels,num_residul,first_residul_block=False):
blk = []
for i in range(num_residul):
if i==0 and not first_residul_block:
blk.append(d2l.torch.Residual(in_channels,out_channels,use_1x1conv=True,strides=2))
else:
blk.append(d2l.torch.Residual(out_channels,out_channels,use_1x1conv=False,strides=1))
return nn.Sequential(*blk)
# 模型使用了更小的卷积核、步长和填充,而且删除了最大汇聚层
net = nn.Sequential(nn.Conv2d(in_channels,64,kernel_size=3,stride=1,padding=1),
nn.BatchNorm2d(64),
nn.ReLU())
net.add_module('resnet_block1',Residul_Block(in_channels=64,out_channels=64,num_residul=2,first_residul_block=True))
net.add_module('resnet_block2',Residul_Block(in_channels=64,out_channels=128,num_residul=2,first_residul_block=False))
net.add_module('resnet_block3',Residul_Block(in_channels=128,out_channels=256,num_residul=2,first_residul_block=False))
net.add_module('resnet_block4',Residul_Block(in_channels=256,out_channels=512,num_residul=2,first_residul_block=False))
net.add_module('adaptivepool2d',nn.AdaptiveAvgPool2d((1,1)))
net.add_module('Flatten',nn.Flatten())
net.add_module('Linear',nn.Linear(in_features=512,out_features=num_classes))
return net
print(resnet18(10))
def train(net,num_gpu,lr,batch_size,epochs):
train_iter,test_iter = d2l.torch.load_data_fashion_mnist(batch_size)
#获取所有GPU
devices = [d2l.torch.try_gpu(i) for i in range(num_gpu)]
#初始化网络权重参数
def init_weight(m):
if type(m) in [nn.Linear,nn.Conv2d]:
nn.init.normal_(m.weight,mean=0,std=0.01)
net.apply(init_weight)
# 在多个GPU对模型进行数据并行,将网络net使用多GPU数据并行进行训练
net = nn.DataParallel(module=net,device_ids=devices)
net = net.to(devices[0])
optim = torch.optim.SGD(net.parameters(),lr=lr)
loss = nn.CrossEntropyLoss()
timer = d2l.torch.Timer()
animator = d2l.torch.Animator('epoch','test acc',xlim=[1,epochs])
for epoch in range(epochs):
net.train()#网络用于训练,必须有,因为模型中有batch_normalization层,batch_norm层在训练和测试两种状态下的权重参数不一样
timer.start()
for X,y in train_iter:
optim.zero_grad()
X = X.to(devices[0])#将输入数据和label都复制到第一个GPU上面
y = y.to(devices[0])
# 模型通过上面nn.DataParallel()多GPU数据并行函数得知使用了多少个GPU,同时将小批量数据平均分配到所有GPU上,然后计算loss和梯度,最后再把每个GPU上面的梯度聚合在一起,然后广播到所有GPU上面,进行网络参数权重更新
y_hat = net(X)
ls = loss(y_hat,y)
ls.backward()
optim.step()
timer.stop()
net.eval()#模型用于测试,必须有,因为模型中有batch_normalization层
animator.add(epoch+1,(d2l.torch.evaluate_accuracy_gpu(net,test_iter),))
print(f'测试精度:{animator.Y[0][-1]:.2f},{timer.avg():.2f}秒/轮,在{str(devices)}')
#网络初始化
resnet = resnet18(num_classes=10,in_channels=1)
lr,epochs,batch_size=0.1,10,256
num_gpu= 2
train(resnet,num_gpu,lr,batch_size,epochs)
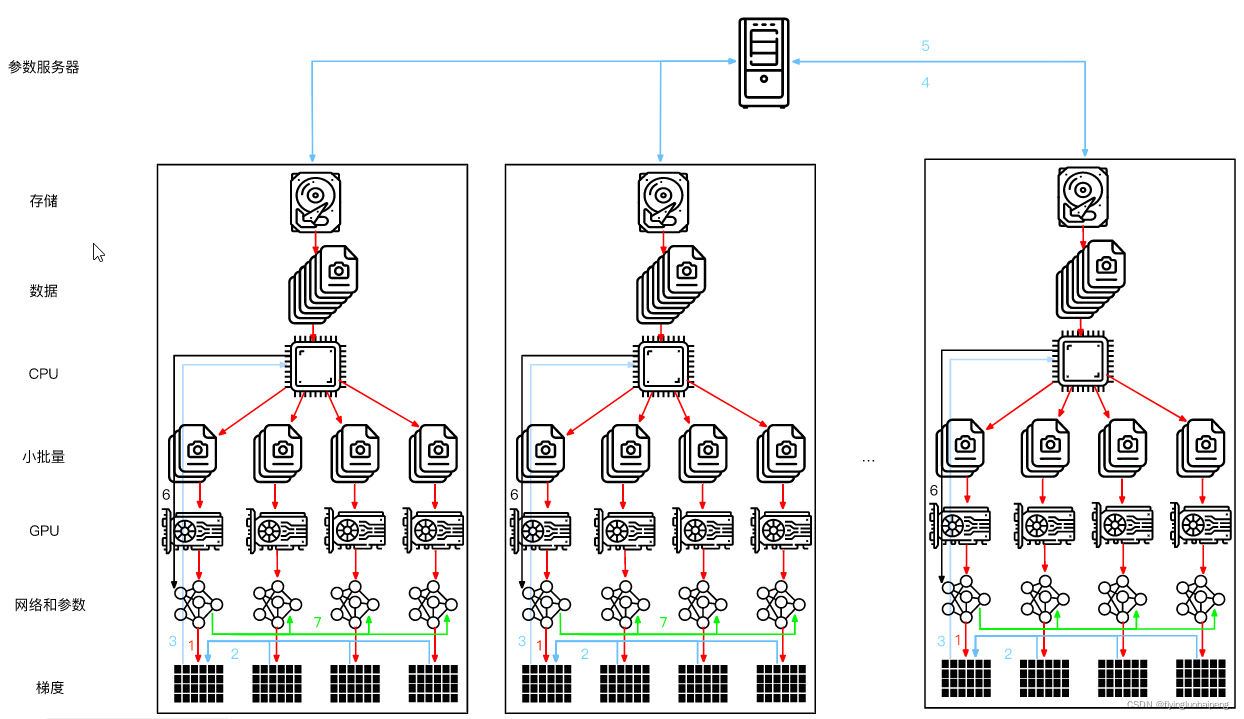
3. 多机器(集群)多GPU分布式训练过程(如下图所示)
- 在每台机器上读取一组(不同的)批量数据,在多个GPU之间分割数据并传输到GPU的显存中。基 于每个GPU上的批量数据分别计算预测和梯度。
- 来自一台机器上的所有的本地GPU的梯度聚合在一个GPU上(或者在不同的GPU上聚合梯度的某些部分)。
- 每台机器的梯度被发送到其本地CPU中。
- 所有的CPU将梯度发送到中央参数服务器中,由该服务器聚合所有梯度。
- 然后使用聚合后的梯度来更新参数,并将更新后的参数广播回各个CPU中。
- 更新后的参数信息发送到本地一个(或多个)GPU中。
- 所有GPU上的参数更新完成。















 1544
1544











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









