




 文章介绍了扩散模型DDPM(去噪扩散潜变量模型)与随机微分方程(SDE)的关联,展示了DDPM如何通过离散迭代逼近SDE的形式。在DDPM中,正向过程是逐步添加噪声,逆过程则通过SDE描述。NCSN(噪声对比估计网络)对应的是VarianceExplodingSDE,而DDPM对应VariancePreservingSDE。两者都利用SDE来建模数据生成的过程,DDPM的去噪器可以通过祖先采样解决SDE方程,而NCSN则依赖Langevin动力学进行迭代优化。
文章介绍了扩散模型DDPM(去噪扩散潜变量模型)与随机微分方程(SDE)的关联,展示了DDPM如何通过离散迭代逼近SDE的形式。在DDPM中,正向过程是逐步添加噪声,逆过程则通过SDE描述。NCSN(噪声对比估计网络)对应的是VarianceExplodingSDE,而DDPM对应VariancePreservingSDE。两者都利用SDE来建模数据生成的过程,DDPM的去噪器可以通过祖先采样解决SDE方程,而NCSN则依赖Langevin动力学进行迭代优化。
SDE与DDPM
以 DDPM 为例,DDPM的通项公式为
x
t
∼
N
(
α
‾
t
x
0
,
(
1
−
α
‾
t
)
I
)
x_t \sim \mathcal N(\sqrt{\overline{\alpha}_t}x_0, (1-\overline{\alpha}_t) I)
xt∼N(αtx0,(1−αt)I)
当我们固定
t
t
t 的取值时,
x
t
x_t
xt 是定义在样本空间上的函数,即为一随机变量,当我们固定
x
x
x的随机性时,即为关于变量
t
t
t 的一个函数,因此
x
t
x_t
xt 是一随机过程,而对于一组确定的
{
x
t
}
t
=
0
T
\{x_t\}_{t=0}^T
{xt}t=0T,称为随机过程的一个实现,或是一条轨迹/轨道,而随机过程可以使用随机微分方程(Stochastic Differential Equation)进行描述
SDE定义为
d
X
t
=
b
(
t
,
X
t
)
d
t
+
σ
(
t
,
X
t
)
d
B
t
dX_t = b(t,X_t)dt + \sigma(t,X_t)dB_t
dXt=b(t,Xt)dt+σ(t,Xt)dBt
其中
B
t
B_t
Bt 表示布朗运动,此方程的解称为伊藤(Itô)过程或是扩散过程。如果我们将 DDPM的迭代式从离散扩展到连续区间,即
x
t
→
x
t
+
Δ
t
(
Δ
t
→
0
)
x_t\rightarrow x_{t+\Delta t}\;\;(\Delta t\rightarrow 0)
xt→xt+Δt(Δt→0),即可得到SDE形式的扩散过程,论文中表示为
d
x
=
f
(
x
,
t
)
d
t
+
g
(
t
)
d
w
dx = f(x,t)dt + g(t)dw
dx=f(x,t)dt+g(t)dw
其中
w
w
w 表示一个标准布朗运动,
f
(
⋅
,
t
)
f(\cdot,t)
f(⋅,t) 称作是漂移系数 (drift coefficient),描述了确定性的变化过程,
g
(
⋅
)
g(\cdot)
g(⋅) 称作是扩散系数 (diffusion coefficient),描述了不确定的变化过程
SDE视角下的生成模型
SDE的离散形式表示如下所示
x
t
+
Δ
t
−
x
t
=
f
(
x
,
t
)
Δ
t
+
g
(
t
)
Δ
t
ε
x_{t+\Delta_t}-x_t = f(x,t)\Delta t + g(t)\sqrt{\Delta t} \varepsilon
xt+Δt−xt=f(x,t)Δt+g(t)Δtε
其中
ε
∼
N
(
0
,
I
)
\varepsilon \sim \mathcal N(0,I)
ε∼N(0,I),因此有条件概率分布
x
t
+
Δ
t
∣
x
t
∼
N
(
x
t
+
f
(
x
t
,
t
)
Δ
t
,
g
2
(
t
)
Δ
t
I
)
x_{t+\Delta_t}|x_t \sim \mathcal N(x_t+f(x_t,t)\Delta t, g^2(t)\Delta t I)
xt+Δt∣xt∼N(xt+f(xt,t)Δt,g2(t)ΔtI)
考虑逆过程
x
t
∣
x
t
+
Δ
t
x_t|x_{t+\Delta t}
xt∣xt+Δt,有
p
(
x
t
∣
x
t
+
Δ
t
)
=
p
(
x
t
+
Δ
t
∣
x
t
)
p
(
x
t
)
p
(
x
t
+
Δ
t
)
=
p
(
x
t
+
Δ
t
∣
x
t
)
exp
(
log
p
(
x
t
)
−
log
p
(
x
t
+
Δ
t
)
)
≈
p
(
x
t
+
Δ
t
∣
x
t
)
exp
{
−
(
x
t
+
Δ
t
−
x
t
)
▽
x
t
log
p
(
x
t
)
−
Δ
t
∂
∂
t
log
p
(
x
t
)
}
∝
exp
{
−
∣
∣
x
t
+
Δ
t
−
x
t
−
f
(
x
t
,
t
)
Δ
t
∣
∣
2
2
2
g
2
(
t
)
Δ
t
−
(
x
t
+
Δ
t
−
x
t
)
▽
x
t
log
p
(
x
t
)
−
Δ
t
∂
∂
t
log
p
(
x
t
)
}
=
exp
{
−
1
2
g
2
(
t
)
Δ
t
∣
∣
(
x
t
+
Δ
t
−
x
t
)
−
(
f
(
x
t
,
t
)
−
g
2
(
t
)
▽
x
t
log
p
(
x
t
)
)
Δ
t
∣
∣
2
2
−
Δ
t
∂
∂
t
log
p
(
x
t
)
−
f
2
(
x
t
,
t
)
Δ
t
2
g
2
(
t
)
+
(
f
(
x
t
,
t
)
−
g
2
(
t
)
▽
x
t
log
p
(
x
t
)
)
2
Δ
t
2
g
2
(
t
)
}
=
Δ
t
→
0
exp
{
−
1
2
g
2
(
t
+
Δ
t
)
Δ
t
∣
∣
(
x
t
+
Δ
t
−
x
t
)
−
(
f
(
x
t
+
Δ
t
,
t
+
Δ
t
)
−
g
2
(
t
+
Δ
t
)
▽
x
t
+
Δ
t
log
p
(
x
t
+
Δ
t
)
)
Δ
t
∣
∣
2
2
}
\begin{align} p(x_t|x_{t+\Delta t}) &= \frac{p(x_{t+\Delta t}|x_t)p(x_t)}{p(x_{t+\Delta t})} \nonumber \\&= p(x_{t+\Delta t}|x_t)\exp(\log p(x_t)-\log p(x_{t+\Delta t})) \nonumber \\&\approx p(x_{t+\Delta t}|x_t)\exp \{ - (x_{t+\Delta t}-x_t)\triangledown_{x_t} \log p(x_t)-\Delta t \frac{\partial }{\partial t}\log p(x_{t})\} \nonumber \\&\propto \exp \{-\frac{||x_{t+\Delta t}-x_t - f(x_t,t)\Delta t||_2^2}{2g^2(t)\Delta t} - (x_{t+\Delta t} - x_t)\triangledown_{x_t}\log p(x_t)- \Delta t \frac{\partial }{\partial t}\log p(x_t)\} \nonumber \\&= \exp \left\{ -\frac{1}{2g^2(t)\Delta t}||(x_{t+\Delta t}-x_t)-(f(x_t,t)-g^2(t)\triangledown_{x_t}\log p(x_t))\Delta t||_2^2 -\Delta t \frac{\partial }{\partial t}\log p(x_t) - \frac{f^2(x_t,t)\Delta t}{2g^2(t)} + \frac{(f(x_t,t)-g^2(t)\triangledown_{x_t}\log p(x_t))^2\Delta t}{2g^2(t)} \right\} \nonumber \\&\overset{\Delta t\rightarrow 0}{=} \exp \left\{ -\frac{1}{2g^2(t+\Delta t)\Delta t}||(x_{t+\Delta t}-x_t)-(f(x_{t+\Delta t},t+\Delta t)-g^2(t+\Delta t)\triangledown_{x_{t+\Delta t}}\log p(x_{t+\Delta t}))\Delta t||_2^2 \right \} \nonumber \end{align}
p(xt∣xt+Δt)=p(xt+Δt)p(xt+Δt∣xt)p(xt)=p(xt+Δt∣xt)exp(logp(xt)−logp(xt+Δt))≈p(xt+Δt∣xt)exp{−(xt+Δt−xt)▽xtlogp(xt)−Δt∂t∂logp(xt)}∝exp{−2g2(t)Δt∣∣xt+Δt−xt−f(xt,t)Δt∣∣22−(xt+Δt−xt)▽xtlogp(xt)−Δt∂t∂logp(xt)}=exp{−2g2(t)Δt1∣∣(xt+Δt−xt)−(f(xt,t)−g2(t)▽xtlogp(xt))Δt∣∣22−Δt∂t∂logp(xt)−2g2(t)f2(xt,t)Δt+2g2(t)(f(xt,t)−g2(t)▽xtlogp(xt))2Δt}=Δt→0exp{−2g2(t+Δt)Δt1∣∣(xt+Δt−xt)−(f(xt+Δt,t+Δt)−g2(t+Δt)▽xt+Δtlogp(xt+Δt))Δt∣∣22}
因此,
x
t
∣
x
t
+
Δ
t
x_t|x_{t+\Delta t}
xt∣xt+Δt 服从均值方差如下的高斯分布
μ
=
x
t
+
Δ
t
−
(
f
(
x
t
+
Δ
t
,
t
+
Δ
t
)
−
g
2
(
t
+
Δ
t
)
▽
x
t
+
Δ
t
log
p
(
x
t
+
Δ
t
)
)
Δ
t
σ
2
=
g
2
(
t
+
Δ
t
)
Δ
t
\mu = x_{t+\Delta t}-(f(x_{t+\Delta t},t+\Delta t)-g^2(t+\Delta t)\triangledown_{x_{t+\Delta t}}\log p(x_{t+\Delta t}))\Delta t \\\sigma^2 = g^2(t+\Delta t)\Delta t
μ=xt+Δt−(f(xt+Δt,t+Δt)−g2(t+Δt)▽xt+Δtlogp(xt+Δt))Δtσ2=g2(t+Δt)Δt
因此,有SDE表示逆过程离散形式与连续形式如下所示
x
t
+
Δ
t
−
x
t
=
(
f
(
x
t
+
Δ
t
,
t
+
Δ
t
)
−
g
2
(
t
+
Δ
t
)
▽
x
t
+
Δ
t
log
p
(
x
t
+
Δ
t
)
)
Δ
t
+
g
(
t
+
Δ
t
)
Δ
t
ε
d
x
=
[
f
(
x
,
t
)
−
g
2
(
t
)
▽
x
t
log
p
(
x
t
)
]
+
g
(
t
)
d
w
\begin{align} x_{t+\Delta t}-x_t &= (f(x_{t+\Delta t},t+\Delta t)-g^2(t+\Delta t)\triangledown_{x_{t+\Delta t}}\log p(x_{t+\Delta t}))\Delta t + g(t+\Delta t)\sqrt{\Delta t}\varepsilon \\dx &= [f(x,t)-g^2(t)\triangledown_{x_t}\log p(x_t)]+g(t)dw \end{align}
xt+Δt−xtdx=(f(xt+Δt,t+Δt)−g2(t+Δt)▽xt+Δtlogp(xt+Δt))Δt+g(t+Δt)Δtε=[f(x,t)−g2(t)▽xtlogp(xt)]+g(t)dw

考虑 NCSN 与 DDPM,两种形式均可以统一到SDE的理论表示形式下面,分别称为 VE-SDE (Variance Exploding) 与 VP-SDE (Variance Preserving),对应 NCSN 与 DDPM
对于NCSN,正向过程(加噪声)如下所示
x
t
=
x
0
+
σ
t
ε
x
t
+
1
=
x
t
+
σ
t
+
1
2
−
σ
t
2
ε
x_t = x_0 + \sigma_t\varepsilon \\ x_{t+1} = x_t+\sqrt{\sigma_{t+1}^2 - \sigma_t^2}\varepsilon
xt=x0+σtεxt+1=xt+σt+12−σt2ε
因此,对应的SDE表示形式中
f
(
x
t
,
t
)
=
0
g
(
t
)
=
d
d
t
σ
t
2
f(x_{t},t)=0 \\g(t)= \frac{d}{dt}\sigma_t^2
f(xt,t)=0g(t)=dtdσt2
对于 DDPM,正向过程(加噪声)如下所示
x
t
=
α
‾
t
x
0
+
1
−
α
‾
t
ε
x
t
+
1
=
1
−
β
t
+
1
x
t
+
β
t
+
1
ε
x_t = \sqrt{\overline{\alpha}_t}x_0 + \sqrt{1-\overline{\alpha}_t}\varepsilon \\ x_{t+1} = \sqrt{1-\beta_{t+1}}x_t + \sqrt{\beta_{t+1}}\varepsilon
xt=αtx0+1−αtεxt+1=1−βt+1xt+βt+1ε
我们令
β
:
[
0
,
1
]
→
R
\beta:[0,1]\rightarrow \R
β:[0,1]→R 代替
β
t
\beta_{t}
βt,满足
β
(
i
T
)
=
T
β
i
\beta(\frac{i}{T}) = T\beta_i
β(Ti)=Tβi,
Δ
t
=
1
T
\Delta t = \frac{1}{T}
Δt=T1,则有
x
t
+
1
=
1
−
β
(
t
+
Δ
t
)
Δ
t
x
t
+
β
(
t
+
Δ
t
)
Δ
t
ε
=
Δ
t
→
0
(
1
−
1
2
β
(
t
)
Δ
t
)
x
t
+
β
(
t
)
Δ
t
ε
\begin{align} x_{t+1} &= \sqrt{1-\beta(t+\Delta t)\Delta t}x_t +\sqrt{\beta(t+\Delta t)\Delta t}\varepsilon \\&\overset{\Delta t\rightarrow 0}{=}(1-\frac{1}{2}\beta(t)\Delta t)x_t+\sqrt{\beta(t)}\sqrt{\Delta t}\varepsilon \end{align}
xt+1=1−β(t+Δt)Δtxt+β(t+Δt)Δtε=Δt→0(1−21β(t)Δt)xt+β(t)Δtε
因此,对应的SDE表现形式中,有
f
(
x
t
,
t
)
=
−
1
2
β
(
t
)
x
t
g
(
t
)
=
β
(
t
)
f(x_{t},t)=-\frac{1}{2}\beta(t)x_t \\g(t)= \sqrt{\beta(t)}
f(xt,t)=−21β(t)xtg(t)=β(t)
当我们希望 t → T t\rightarrow T t→T 时,图像为纯粹的噪声图像,那么 σ t → ∞ \sigma_t\rightarrow \infty σt→∞,但 α ‾ t → 0 \overline{\alpha}_t \rightarrow 0 αt→0 即可,因此分别称作是 VE-SDE 和 VP-SDE
DDPM Denoiser
ϵ
θ
(
x
t
,
t
)
\epsilon_\theta(x_t,t)
ϵθ(xt,t) 与 NCSN Estimator
s
θ
(
x
t
,
t
)
s_\theta(x_t,t)
sθ(xt,t) :在 DDPM 正向过程中,有
x
t
∼
N
(
α
‾
t
x
0
,
(
1
−
α
‾
t
)
I
)
x_t \sim \mathcal N(\sqrt{\overline \alpha}_t x_0, (1-\overline \alpha_t)I)
xt∼N(αtx0,(1−αt)I),代入
s
θ
(
x
t
,
t
)
=
▽
x
t
log
p
(
x
t
)
s_\theta(x_t,t) = \triangledown_{x_t} \log p(x_t)
sθ(xt,t)=▽xtlogp(xt),可以得到
s
θ
(
x
t
,
t
)
=
−
x
t
−
α
‾
t
x
0
1
−
α
‾
t
=
−
1
1
−
α
‾
t
ϵ
θ
(
x
t
,
t
)
s_\theta(x_t,t) = -\frac{x_t-\sqrt{\overline \alpha}_t x_0}{1-\overline \alpha_t} = -\frac{1}{\sqrt{1-\overline \alpha_t}} \epsilon_\theta(x_t,t)
sθ(xt,t)=−1−αtxt−αtx0=−1−αt1ϵθ(xt,t)
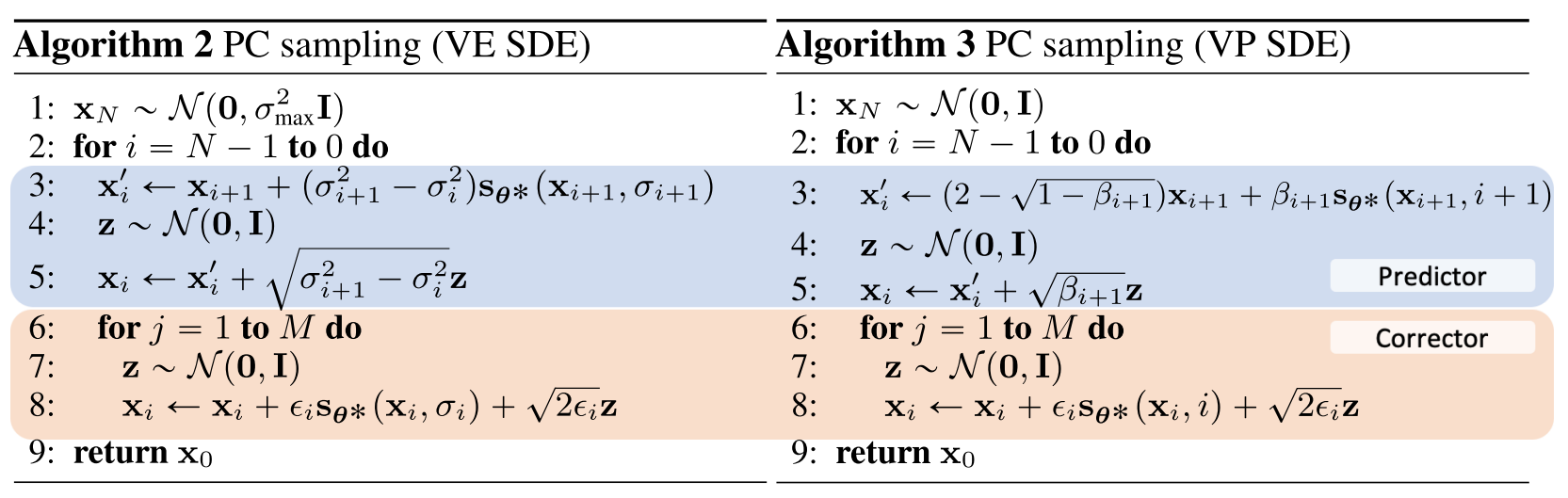
PC Sampling
最后,从算法实现的角度来回顾一下 DDPM 和 NCSN,DDPM基于的假设是 Markov 假设,假定不同时间的采样之间服从条件概率分布,因此 DDPM 采用称作是祖先采样(Ancestral Sampling)的方式去求解 SDE 方程,给出的算法如下所示

而 NCSN 依赖于 Langevin Dynamics 进行同一噪声分布下的迭代优化,对于不同的噪声大小,得到的采样之间并没有进行任何的依赖关系,其采样方式如下所示

前者可以看作是对于 SDE 方程的离散形式求解,称为Predictor,后者可以看作是进一步的优化过程,称为 Corrector,作者结合这两部分,给出了 Predictor-Corrector Sampling Method
参考资料
Score-based Generative Modeling Through Stochastic Differential Equations

















 1736
1736

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









