







在产品设计过程中,我们经常会遇到数模转换的应用需求。在本篇种我们就来讨论一下MCP4725单通道数模转换器的驱动设计与实现。
1、功能概述
MCP4725是一个低功耗,高精度,单通道,12位缓冲电压输出数字到模拟转换器(DAC)与非易失性存储器(EEPROM)。它的板载精度输出放大器允许它实现轨到轨模拟输出摆动。
DAC输入和配置数据可以被编程到非易失性存储器(EEPROM)由用户使用I2C接口命令。非易失性存储器特性使DAC设备能够在断电时保存DAC输入代码,并且在通电后立即提供DAC输出。当DAC设备被用作网络中其他设备的支持设备时,这个特性非常有用。MCP4725的引脚定义及排布如下:

MCP4725有一个外部A0地址位选择引脚。这个A0引脚可以绑定到用户应用PCB板的VDD或VSS上。这个引脚被用户用来选择A0地址位。用户可以将这个引脚绑定到VSS(逻辑’ 0 ‘),或VDD(逻辑’ 1 '),或可以由数字逻辑级别主动驱动,如I2C主输出。
MCP4725的地址字节由两个部分组成,第一部分为4位设备代码,固定设置为1100的,设备代码后面是三位为地址位(A2, A1, A0),如下图所示:

A2和A1位的选择可由客户提供,作为订购过程的一部分。两位在出厂前设定好,如果客户没有特别要求的话,A2和A1会默认编程为“00”。而A0位则由A0引脚的逻辑状态决定。
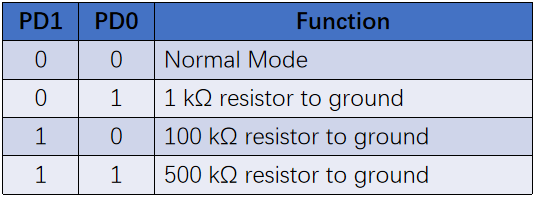
MCP4725设备包括一个上电复位(POR)电路,以确保可靠的上电,以及一个用于EEPROM编程电压的板载电荷泵。DAC引用是直接从VDD驱动的。在down模式下,输出放大器可以配置为已知的低、中或高阻输出负载,如下图。
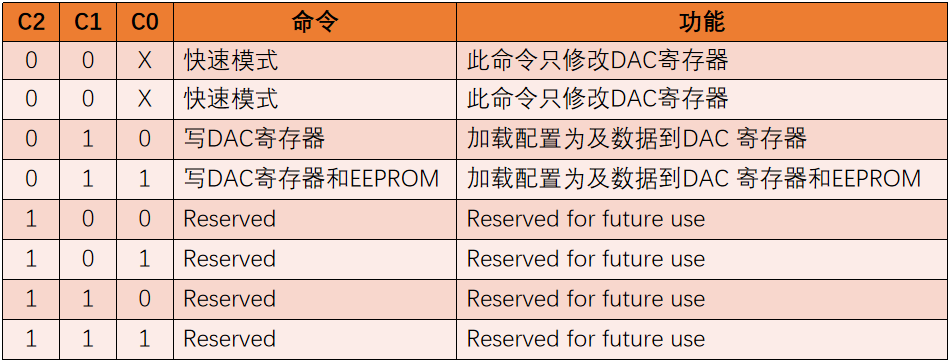
MCP472的写命令用于将配置位和DAC输入码加载到DAC寄存器,或写入设备的EEPROM。写命令类型由三个写命令类型位(C2、C1、C0)定义。写命令类型及其作用如下表所示。
2、驱动设计与实现
在前一节中,我们梳理了MCP4725单通道数模转换器的基本技术参数。在这一节中,我们将依据这些技术参数来设计MCP4725单通道数模转换器的驱动程序。我们依然是基于对象的思想来实现之。
2.1、对象定义
我们基于对象来实现驱动程序,所以我们就需要先得到对象,在这里我们首先将抽象出MCP4725单通道数模转换器的对象类型。一版来说,对象皆包含属性与操作两个方面的内容。在抽象对象类型的过程中,我们需要分析MCP4725单通道数模转换器都有哪些属性和操作。
我们先来分析MCP4725单通道数模转换器的对象的属性。每一台I2C从设备都有一个设备地址,这个地址实际上标识了总线上设备的身份,MCP4725亦如此,所以我们将设备地址作为对象的一个属性。对于MCP4725单通道数模转换器,有一个掉电处理模式是需要配置的,为了掌握其配置状态我们将其作为对象的一个属性记录下来。
接下来分析MCP4725单通道数模转换器的对象的操作。MCP4725单通道数模转换器的基本操作无非就是读写数据,而要实现读和写则依赖于具体的软硬件平台,所以我们将读和写MCP4725单通道数模转换器都作为对象的操作来实现。
根据上述关于MCP4725单通道数模转换器对象属性和操作的分析,我们可以抽象得到其对象类型如下:
/*定义MCP4725对象类型*/
typedef struct Mcp4725Object {
uint8_t devAddress;
Mcp4725PDModeType pdMode;
void (*Write)(struct Mcp4725Object *mcp,uint8_t *wData, uint16_t wSize);
void (*Read)(struct Mcp4725Object *mcp,uint8_t *rData, uint16_t rSize);
}Mcp4725ObjectType;
抽象了对象类型后就可声明对象变量,可是这个对象变量必须作必要的初始化才能使用。所以我们需要一个初始化函数来对其进行初始化。在此函数中,我们将检测变量的有效性和初始状态赋值,并对设备进行必要的配置。根据这些要求我们设计MCP4725单通道数模转换器的对象初始化函数如下:
/*MCP4725初始化配置*/
void Mcp4725Initialization(Mcp4725ObjectType *mcp, //MCP4725对象变量
uint8_t slaveAddress, //从站设备的地址
Mcp4725PDModeType pdMode,//掉电操作模式
Mcp4725Write write, //写数据函数指针
Mcp4725Read read //读数据函数指针
)
{
if((mcp==NULL)||(write==NULL)||(read==NULL))
{
return;
}
mcp->Write=write;
mcp->Read=read;
if((slaveAddress==0x60)||(slaveAddress==0x61))
{
mcp->devAddress=(slaveAddress<<1);
}
else if((slaveAddress==0xC0)||(slaveAddress==0xC2))
{
mcp->devAddress=slaveAddress;
}
else
{
mcp->devAddress=0x00;
}
mcp->pdMode=pdMode;
}
2.2、对象操作
有了对象变量,也完成了初始化,那么我们就可以用其来操作MCP4725单通道数模转换器了。所以我们来看看实现对MCP4725单通道数模转换器的读写操作。
首先我们来看看写MCP4725单通道数模转换器的实现。写MCP4725单通道数模转换器有两种模式:快速模式和正常模式。快速模式就是将命令与数据结合在一起,这要只需发送三个字节就可完成写数据的过程。具体的操作时序如下:

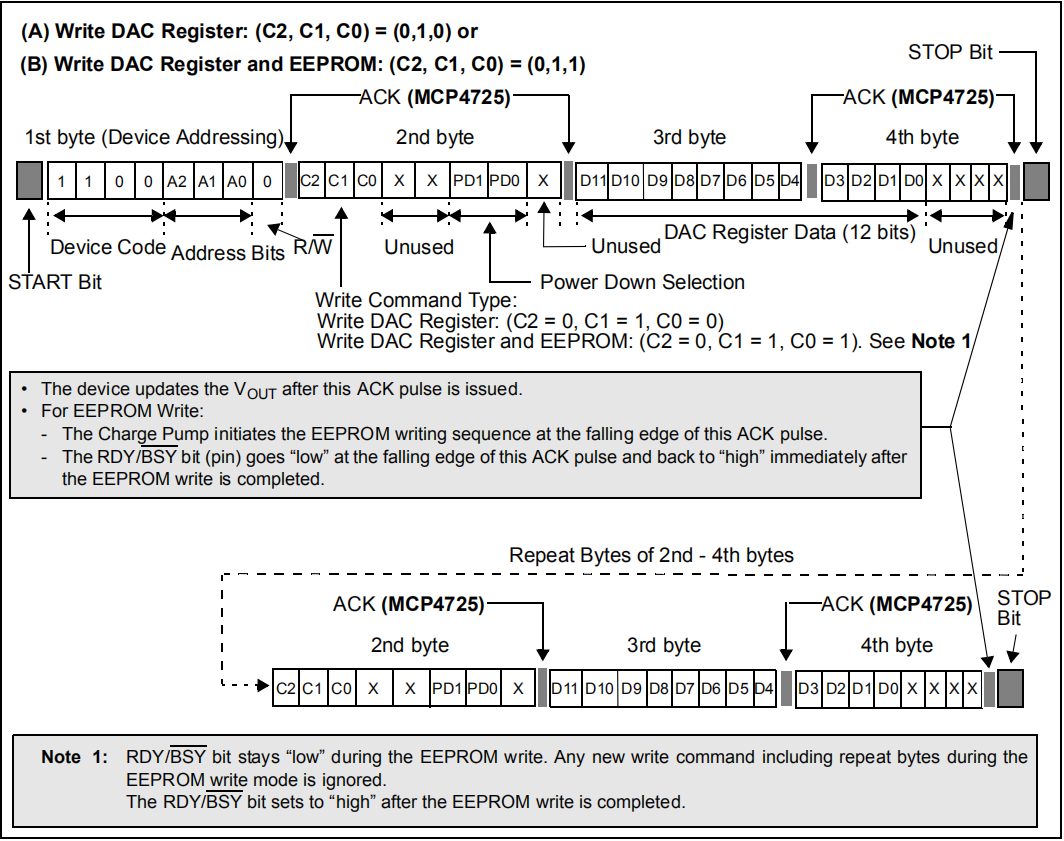
而正常模式则是命令是单独的字节,数据是另外的2个字节,所以正常模式一次发送4个字节才能完成写的过程。正常模式可以操作寄存器也可操作EEPROM,这一点与快速模式是不一样的。具体的操作时序如下:
根据前面的描述和时序图,我们可以设计写MCP4725单通道数模转换器的函数。下面的函数可以快速模式和普通模式,有命令类型来决定最终的操作方式。
/*设置MCP4725输出*/
void Mcp4725SetDatas(Mcp4725ObjectType *mcp,Mcp4725CommandType cmd,uint16_t data)
{
uint8_t wData[3];
uint8_t pdMode=0;
uint16_t wSize=0;
uint8_t command[]={Fast_Mode,Write_DAC_Register,Write_DAC_Register_EEPROM};
pdMode=(uint8_t)(mcp->pdMode);
if(cmd==Mcp4725_Fast_Mode) //快速模式
{
wData[1]=(uint8_t)data;
wData[0]=(uint8_t)(data>>8);
wData[0]=wData[0]|command[cmd];
wData[0]=wData[0]|(pdMode<<4);
wSize=2;
}
else //普通模式
{
wData[0]=command[cmd];
wData[0]=wData[0]|(pdMode<<1);
wData[1]=(uint8_t)(data>>4);
wData[2]=(uint8_t)(data<<4);
wSize=3;
}
mcp->Write(mcp,wData,wSize);
}
MCP4725单通道数模转换器不断可以写数据也可以读数据。读回来的数据包括状态命令字、DAC寄存器数据以及EEPROM数据,总共是5个字节。具体的操作时序如下:

根据前速的分析以及时序图,我们可以简单实现读操作如下:
/*读取MCP4725数据*/
void Mcp4725GetDatas(Mcp4725ObjectType *mcp,uint8_t *rData)
{
mcp->Read(mcp,rData,5);
}
3、驱动的使用
我们已经实现了MCP4725单通道数模转换器的驱动程序。我们还需要将这一驱动程序实际应用一下以确认驱动程序的正确性。
3.1、声明并初始化对象
同样,我们先声明一个MCP4725单通道数模转换器对象变量。前面我们已经抽象了对象类型,使用MCP4725单通道数模转换器对象类型声明如下:
Mcp4725ObjectType mcp4725;
对于这个对象变量,我们还需要使用Mcp4725Initialization函数对它进行初始化才能使用。这个初始化函数有多个输入参数:
Mcp4725ObjectType *mcp, //MCP4725对象变量
uint8_t slaveAddress, //从站设备的地址
Mcp4725PDModeType pdMode,//掉电操作模式
Mcp4725Write write, //写数据函数指针
Mcp4725Read read //读数据函数指针
这些参数中,第一个参数是我们要初始化的对象变量,已经在前面声明了。slaveAddress是指MCP4725单通道数模转换器的设备地址。掉电操作模式是枚举类型,根据使用需要选择就可以了。最后两个读写操作函数指针则需要我们实现相应的函数。这两个函数的原型定义如下:
typedef void (*Mcp4725Write)(struct Mcp4725Object *mcp,uint8_t *wData, uint16_t wSize);
typedef void (*Mcp4725Read)(struct Mcp4725Object *mcp,uint8_t *rData, uint16_t rSize);
读写操作函数的实现与具体的软硬件平台是相关的,这里我们实现STM32F103硬件平台和HAL库的对应函数:
/*通过I2C1端口写MCP4725*/
static void BmcbMcp4725Write(struct Mcp4725Object *mcp,uint8_t *wData, uint16_t wSize)
{
HAL_I2C_Master_Transmit(&hi2c1,mcp->devAddress,wData,wSize,1000);
}
/*通过I2C1端口读MCP4725*/
static void BmcbMcp4725Read(struct Mcp4725Object *mcp,uint8_t *rData, uint16_t rSize)
{
HAL_I2C_Master_Receive(&hi2c1,mcp->devAddress,rData,rSize,1000);
}
有了这些参数后,我们就可以使用这些参数来初始化MCP4725单通道数模转换器的对象变量了。
Mcp4725Initialization(&mcp4725, //MCP4725对象变量
0xC0, //从站设备的地址
MCP4725_Normal, //掉电操作模式
BmcbMcp4725Write, //写数据函数指针
BmcbMcp4725Read //读数据函数指针
);
3.2、基于对象进行操作
关于对象的应用这块,我们将实际工程中的应用代码节选过来。具体很简单就是计算当前应该下发的数字编码并将其下发给MCP4725单通道数模转换器就可以了。
uint16_t code=0;
code=(uint16_t)((aPara.phyPara.presControl/100.0)*4095.0);
Mcp4725SetDatas(&mcp4725,Mcp4725_Write_DAC,code);
4、应用总结
我们设计并实现了MCP4725单通道数模转换器的驱动程序,而且将其运用到了实际的工程当中,使用情况符合我们的预期。
源码下载:https://github.com/foxclever/ExPeriphDriver















 766
766











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









