






我把本次部署分为三个阶段:前置步骤,环境搭建,运行测试
前置步骤
前置步骤是整个环境的基础,首先是确认机器的cuda版本并找到对应得pytorch版本
注意:这里一定要匹配,否则无法正常运行python setup.py develop
Previous PyTorch Versions | PyTorch![]() https://pytorch.org/get-started/previous-versions/
https://pytorch.org/get-started/previous-versions/

避免麻烦,这里我在autodl上新建了一个实例,然后前置工作就完成了。

环境搭建
架设好基础后可以开始环境搭建了。
#克隆
git clone GitHub - open-mmlab/OpenPCDet: OpenPCDet Toolbox for LiDAR-based 3D Object Detection.
#进入目录
cd OpenPCDet
#安装环境
pip install -r requirements.txt
#通过运行以下命令安装此库及其依赖库
python setup.py develop
#以下都安装后再运行
#安装open3d
pip install open3d
#更新pip:我这遇到问题更新后解决了
python -m pip install --upgrade pip
#安装spocnv
pip install spconv-cu113
#安装av2
pip install av2
#安装kornia==0.6.5(这里不能按照最新版,否则会报错)
pip install kornia==0.6.5运行测试
1.在官网下载权值文件:这里用到的是pointpillar,放在目录下

2.在官网下载点云数据:放在目录下

3.运行demo
cd tools
python demo.py --cfg_file cfgs/kitti_models/pointpillar.yaml --ckpt ../pointpillar_7728.pth --data_path ../000000.bin4.输出结果
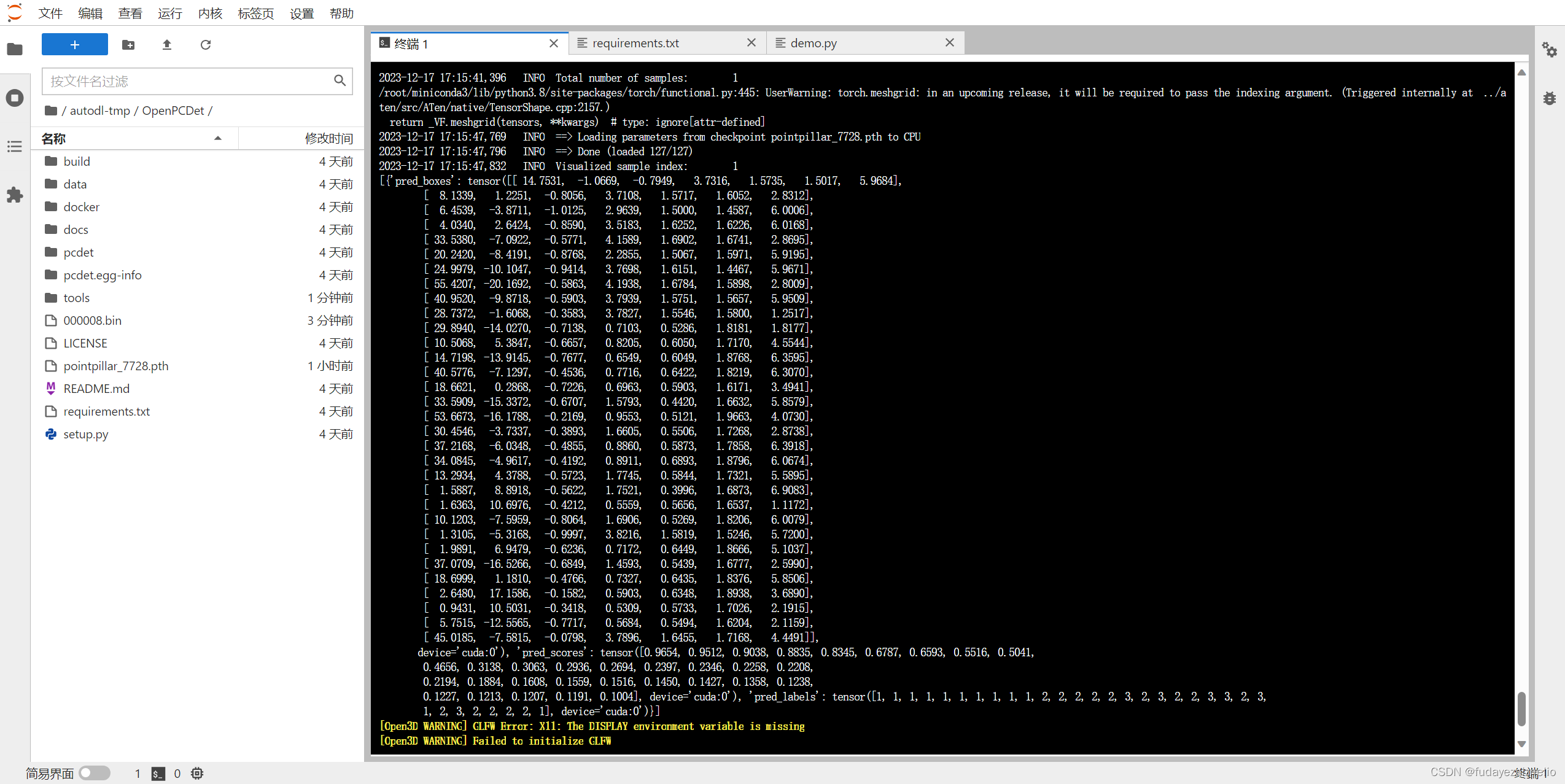














 6376
6376











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









