






离散系统(Discrete-time Systems)是系统的全部或关键组成部分的变量具有离散信号形式,系统的状态在时间的离散点作突变的系统。在时间的离散时刻上取值的变量称为离散信号,通常是时间间隔相等的数字序列,例如按一定的采样时刻进行的数据收集。对离散系统需用差分方程描述。离散系统理论广泛应用于社会、经济及工程系统领域,如自动机、脉冲控制、采样调节、数字控制等。离散事件动态系统由触发事件驱动状态演化的动态系统。这种系统的状态通常只取有限个离散值,对应于系统部件的好坏、忙闲等可能状况。系统的行为可用它产生的状态或事件序列来描述。系统状态的改变是由某些环境条件的出现或消失、某些运算、操作的启动或结束等随机事件驱动而引起的。由于其状态空间缺乏可运算的结构,难以用传统的基于微分或差分方程的方法来研究,利用计算机仿真进行实验研究常常是主要的方法。
基本概念
离散信号
离散信号,即离散时间信号,和连续时间信号并列为两种基本信号类型,是定义在离散时刻点的信号,或者说是自变量仅取在一组离散值上的信号。
离散系统
离散系统,即离散时间系统,是将离散时间输入信号变换为离散时间输出信号的系统,对于控制系统来说,有一处或几处信号是一串脉冲或数码的控制系统是离散系统。采样和量化是离散系统中十分重要的两个信号处理过程。
Z变换
Z变换(z-transformation)可将时域信号(即:离散时间序列)变换为在复频域的表达式;是处理离散时间信号的重要工具和途径。典型的双边Z变换公式如下所示:

分类
采样控制系统
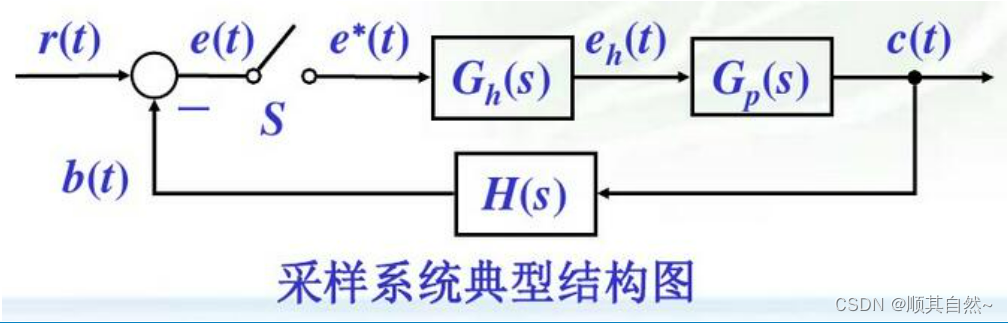
采样控制系统,或称脉冲控制系统,是指信号形式为脉冲序列的离散系统。
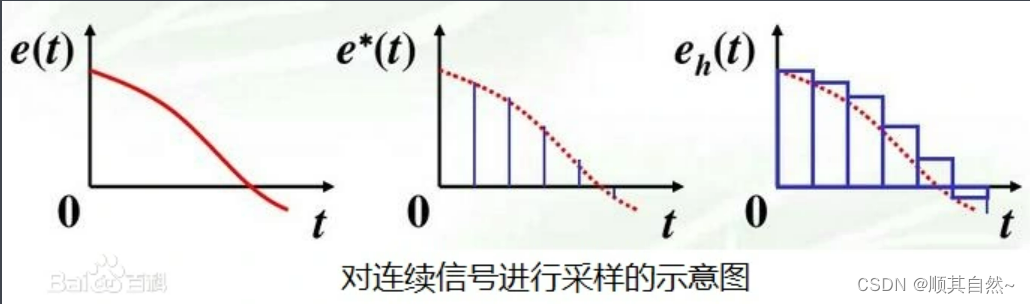
一般来说,采样系统是对来自传感器的连续信息在某些规定的时间瞬间取值。如果在有规律的时间间隔下取值,这个时间间隔就称为采样周期,这种采样称为周期采样;否则为非周期采样,或称随机采样。
数字控制系统
数字控制系统,或称计算机控制系统,是指信号形式为数字序列的离散系统。
通常来说,数字控制系统是一种以数字计算机为控制器去控制具有连续工作状态的被控对象的闭环控制系统。
特点
1)优越性:数字校正的效果好于连续校正;
2)灵活性:软件实现的控制律更加灵活;
3)抗干扰:使用采样信号或数字信号的形式易于抑制噪音;
4)精度高:可以采用高敏感度的控制元件提高控制精度;
5)高效性:计算机可分时控制多个系统,效率更高;
6)经济性:数字控制系统的复现性更好,收益更高,成本更低;
研究方法
由于离散系统中存在离散信号,连续系统中的拉式变换不总是适用于离散系统,有可能出现复变量s的超越函数(实际问题经常简化为线性系统,此时对线性时不变系统而言不会出现超越函数),因此使用z变换法建立离散系统的数学模型。
在现代控制理论中,通常使用状态空间的概念来描述离散系统。
转自:百度百科-验证

















 2226
2226

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









