







运动模板是一种有效的跟踪普通运动的方法,尤其应用在姿态识别中。运动模板方法首先需要的是知道物体的轮廓,而轮廓的获取可以有很多的方法,关于轮廓的获取方法在此不做多余的叙述。
运动模板程序的大致编程思路应该是是这样的:获得当前帧与上一帧的差,然后对差图像进行二值化;更新运动历史图像;然后计算运动历史图像的梯度方向,并将整个运动分割为独立的运动部分,在用一个结构序列标记每一个运动分割,最后计算出选择区域的全局运动方向,从而获得运动目标的质心位置与运动方向。
opencv中完成运动模板构建的函数是cvUpdateMotionHistory:
void cvUpdateMotionHistory (
const CvArr *silhouette, /* 非0像素代表前景物体的最新的分割轮廓 */
CvArr *mhi, /* 运动模板,也即运动历史图像 */
double timestamp, /* 当前系统时间 */
double duration /* 运动跟踪的最大持续时间 */
);
在cvUpdateMotionHistory中,所有图像都是单通道图像,图像silhouette是一幅单字节图像,其中非零像素代表前景物体的分割轮廓。图像mhi是一幅浮点值图像,代表运动模板(也就是运动历史图像)。timestamp是当前系统时间,以毫秒为单位。mhi中任何比timestamp减去duration的值早(少)的像素将被设置为0。
一旦运动模板记录了不同时间的物体轮廓,就可以用计算mhi图像的梯度来获取全局运动信息。使用如下函数:
void cvCalcMotionGradient (
const CvArrs *mhi, /* 运动历史图像 */
CvArr *mask, /* 非0值代表此点处的梯度有效 */
CvArr *orientation, /* 每一点梯度方向的角度 */
double delta1,
double delta2, /* delta1、delta2分别是允许的最小和最大梯度值 */
int aperture_size = 3 /* 设置梯度算子的宽和高 */
);
梯度方向求出后,即可以计算全局运动方向,给出如下函数:
double cvCalcGlobalOrientation (
/* 前三个参数都是根据上面两个函数得出来的 */
const CvArr *orientation,
const CvArr *mask,
const CvArr *mhi,
double timestamp,
double duration
);
分割和计算局部运动的函数是cvSegmentMotion:
CvSeq *cvSegmentMotion (
const CvArr *mhi, CvArr *seg_mask, CvMemStorage *storage,
double timestamp, double seg_thresh);
示例代码如下:
#include "opencv2/video/tracking.hpp"
#include "opencv2/highgui/highgui.hpp"
#include "opencv2/imgproc/imgproc_c.h"
#include <time.h>
#include <stdio.h>
#include <ctype.h>
/* 不同的跟踪参数 */
const double MHI_DURATION = 0.5;
const double MAX_TIME_DELTA = 0.5;
const double MIN_TIME_DELTA = 0.05;
const int N = 2; /* 用于运动检测的循环帧数,与机器速度及FPS设置有关 */
IplImage **buf = NULL;
int last = 0;
/* 临时图像 */
IplImage *mhi = 0; /* MHI:运动历史图像 */
IplImage *orient = 0; /* 方向 */
IplImage *mask = 0; /* 有效的运动掩码 */
IplImage *segmask = 0; /* 运动分割映射 */
CvMemStorage *storage = 0; /* 临时存储区 */
/* parameters:
img - input video frame
dst - resultant motion picture
args - optional parameters */
void update_mhi ( IplImage *img, IplImage *dst, int diff_threshold ) {
double timestamp = ( double ) clock() / CLOCKS_PER_SEC; /* 获取当前时间,以秒为单位 */
CvSize size = cvSize ( img->width, img->height ); /* 获取当前帧尺寸 */
int i, idx1 = last, idx2;
IplImage *silh;
CvSeq *seq;
CvRect comp_rect;
double count;
double angle;
CvPoint center;
double magnitude;
CvScalar color;
/* 开始时为图像分配内存 or 帧尺寸改变时重新分配内存 */
if ( !mhi || mhi->width != size.width || mhi->height != size.height ) {
if ( buf == 0 ) {
buf = ( IplImage ** ) malloc ( N * sizeof ( buf[0] ) );
memset ( buf, 0, N * sizeof ( buf[0] ) );
}
for ( i = 0; i < N; i++ ) {
cvReleaseImage ( &buf[i] );
buf[i] = cvCreateImage ( size, IPL_DEPTH_8U, 1 );
cvZero ( buf[i] );
}
cvReleaseImage ( &mhi );
cvReleaseImage ( &orient );
cvReleaseImage ( &segmask );
cvReleaseImage ( &mask );
mhi = cvCreateImage ( size, IPL_DEPTH_32F, 1 );
cvZero ( mhi ); /* clear MHI at the beginning */
orient = cvCreateImage ( size, IPL_DEPTH_32F, 1 );
segmask = cvCreateImage ( size, IPL_DEPTH_32F, 1 );
mask = cvCreateImage ( size, IPL_DEPTH_8U, 1 );
}
cvCvtColor ( img, buf[last], CV_BGR2GRAY ); /* RGB帧图像格式转换为gray */
idx2 = ( last + 1 ) % N; /* index of (last - (N-1))th frame */
last = idx2;
silh = buf[idx2];
/* 相邻两帧的差 */
cvAbsDiff ( buf[idx1], buf[idx2], silh );
cvThreshold ( silh, silh, diff_threshold, 1, CV_THRESH_BINARY ); /* 对差图像做二值化 */
cvUpdateMotionHistory ( silh, mhi, timestamp, MHI_DURATION ); /* 更新运动历史 */
/* convert MHI to blue 8u image
cvCvtScale的第四个参数 shift = (MHI_DURATION - timestamp) * 255. / MHI_DURATION
控制帧差的消失速率 */
cvCvtScale ( mhi, mask, 255. / MHI_DURATION, ( MHI_DURATION - timestamp ) * 255. / MHI_DURATION );
cvZero ( dst );
cvMerge ( mask, 0, 0, 0, dst );
/* B, G, R, 0 convert to BLUE image
计算运动的梯度方向以及正确的方向掩码
Filter size = 3 */
cvCalcMotionGradient ( mhi, mask, orient, MAX_TIME_DELTA, MIN_TIME_DELTA, 3 );
if ( !storage ) {
storage = cvCreateMemStorage ( 0 );
} else {
cvClearMemStorage ( storage );
}
/* 运动分割:获得运动部件的连续序列 */
seq = cvSegmentMotion ( mhi, segmask, storage, timestamp, MAX_TIME_DELTA );
for ( i = -1; i < seq->total; i++ ) {
if ( i < 0 ) { /* 对整幅图像操作 */
comp_rect = cvRect ( 0, 0, size.width, size.height );
color = CV_RGB ( 255, 255, 255 );
magnitude = 100; /* 画线长度以及圆半径的大小控制 */
} else { /* 第i个运动组件 */
comp_rect = ( ( CvConnectedComp * ) cvGetSeqElem ( seq, i ) )->rect;
if ( comp_rect.width + comp_rect.height < 100 ) { /* 去掉小的部分 */
continue;
}
color = CV_RGB ( 255, 0, 0 );
magnitude = 30;
}
/* 选择组件ROI */
cvSetImageROI ( silh, comp_rect );
cvSetImageROI ( mhi, comp_rect );
cvSetImageROI ( orient, comp_rect );
cvSetImageROI ( mask, comp_rect );
/* 在选择的区域内,计算运动方向 */
angle = cvCalcGlobalOrientation ( orient, mask, mhi, timestamp, MHI_DURATION );
angle = 360.0 - angle; /* adjust for images with top-left origin */
/* 在轮廓内计算点数;Norm(L1) = 所有像素值的和 */
count = cvNorm ( silh, 0, CV_L1, 0 );
cvResetImageROI ( mhi );
cvResetImageROI ( orient );
cvResetImageROI ( mask );
cvResetImageROI ( silh );
/* 检查小运动的情形 */
if ( count < comp_rect.width * comp_rect.height * 0.05 ) { /* 像素的5% */
continue;
}
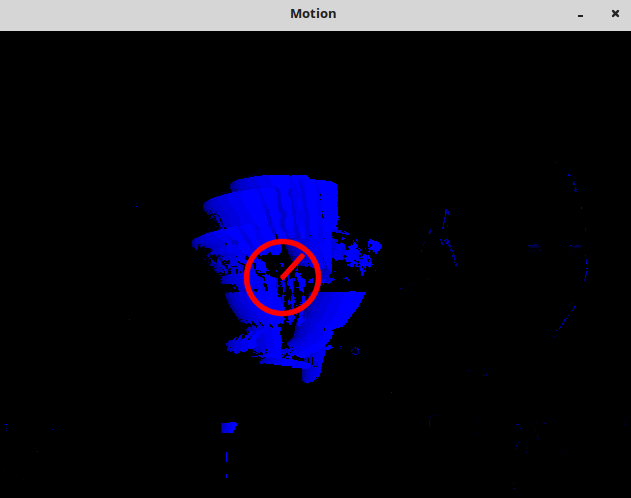
/* 画一个带箭头的记录以表示方向 */
center = cvPoint ( ( comp_rect.x + comp_rect.width / 2 ), ( comp_rect.y + comp_rect.height / 2 ) );
cvCircle ( dst, center, cvRound ( magnitude * 1.2 ), color, 3, CV_AA, 0 );
cvLine (
dst, center,
cvPoint ( cvRound ( center.x + magnitude * cos ( angle * CV_PI / 180 ) ), \
cvRound ( center.y - magnitude * sin ( angle * CV_PI / 180 ) ) ),
color, 3, CV_AA, 0
);
}
}
int main ( int argc, char **argv ) {
IplImage *motion = 0;
CvCapture *capture = 0;
if ( argc == 1 || ( argc == 2 && strlen ( argv[1] ) == 1 && isdigit ( argv[1][0] ) ) ) {
capture = cvCaptureFromCAM ( argc == 2 ? argv[1][0] - '0' : 0 );
} else if ( argc == 2 ) {
capture = cvCaptureFromAVI ( argv[1] );
}
if ( capture ) {
cvNamedWindow ( "Motion", 1 );
for ( ;; ) {
IplImage *image = cvQueryFrame ( capture );
if ( !image ) {
break;
}
if ( !motion ) {
motion = cvCreateImage ( cvSize ( image->width, image->height ), 8, 3 );
cvZero ( motion );
motion->origin = image->origin;
}
update_mhi ( image, motion, 30 );
cvShowImage ( "Motion", motion );
if ( cvWaitKey ( 1 ) >= 0 ) {
break;
}
}
cvReleaseCapture ( &capture );
cvDestroyWindow ( "Motion" );
}
return 0;
}















 2万+
2万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









