






采用永磁同步模型的电流预测控制和滑模控制来提高的鲁棒性和稳态特性。滑模控制器结合了新型趋近律和扰动观测器,以实现更好的控制效果。电流环使用了预测控制双矢量改进算法,以提高控制精度和响应速度。
涉及的知识点和领域范围:
1. 永磁同步模型:永磁同步模型是一种电机模型,其特点是具有高效率和高功率密度。它通过永磁体产生磁场,与定子绕组产生的旋转磁场相互作用,从而实现电机运转。
2. 电流预测控制:电流预测控制是一种控制策略,通过对电机电流进行预测,以提前调整控制器输出,从而实现对电机性能的优化控制。
3. 滑模控制:滑模控制是一种非线性控制方法,通过引入滑模面来实现对状态的快速调节和抑制外部扰动的能力。
4. 鲁棒性:鲁棒性是指对于参数变化、外部扰动和建模误差等不确定性的抵抗能力。在控制中,鲁棒性是指控制器对于这些不确定性的影响程度。
5. 稳态特性:稳态特性是指在稳定工作状态下的性能表现,包括稳定性、精度和响应速度等。
延申科普:
永磁同步模型电流预测控制和滑模控制是在电机控制领域中常用的控制策略。永磁同步模型电机由于其高效率和高功率密度的特点,在工业应用中得到广泛应用,如电动汽车、风力发电等领域。
电流预测控制是一种先进的控制方法,通过对电机电流进行预测,可以提前调整控制器输出,以实现对电机性能的优化控制。这种方法可以提高电机的控制精度和响应速度,从而提高的性能。
滑模控制是一种非线性控制方法,通过引入滑模面来实现对状态的快速调节和抑制外部扰动的能力。滑模控制具有较强的鲁棒性,能够在面对参数变化和外部扰动时保持较好的控制效果。
在电机控制领域中,研究者们通过不断改进控制算法和结构,提高的鲁棒性和稳态特性,以满足不同应用场景对电机性能的要求。相关的学习文献可以提供更深入的了解和研究方向。
永磁同步模型电流预测控制+滑模控制
滑膜控制器采用新型趋近律与扰动观测器结合,提高鲁棒性和稳态特性。
电流环采用预测控制双矢量改进算法。
含有对应学习文献
YID:98400648275525103
电机控制学者
探索滑模控制与永磁同步模型电流预测的融合:新型趋近律与扰动观测器的应用
摘要:
本文将探讨一种新型的滑模控制策略,该策略结合了新型趋近律与扰动观测器,并应用于永磁同步电机(PMSM)的电流预测控制中。我们将详细介绍这种控制策略的原理、设计方法以及实验结果,并附上相关学习文献。
一、引言
在电机控制领域,永磁同步电机(PMSM)以其高效率、高功率密度等优点得到了广泛应用。然而,其控制算法的复杂性以及对外界扰动的敏感性仍需深入研究。特别是在电流控制方面,传统的控制策略往往难以同时保证的鲁棒性和稳态特性。为此,本文提出了一种结合滑模控制和预测控制的双矢量改进算法,以期提升PMSM的电流控制性能。
二、滑模控制与新型趋近律
滑模控制是一种变结构控制方法,通过设计滑模面和滑模控制律来实现的稳定性和快速响应。在本文中,我们采用了一种新型的趋近律,该趋近律结合了动态特性和扰动观测器的信息,使得滑模控制具有更高的鲁棒性和更好的稳态特性。
三、扰动观测器的应用
扰动观测器是用于估计受到的外部扰动的一种方法。在PMSM的电流控制中,我们采用了一种新型的扰动观测器,它能够实时估计的扰动情况,并反馈给滑模控制器。这样,滑模控制器就可以根据的实际运行情况调整其控制策略,从而保证的稳定性和快速响应。
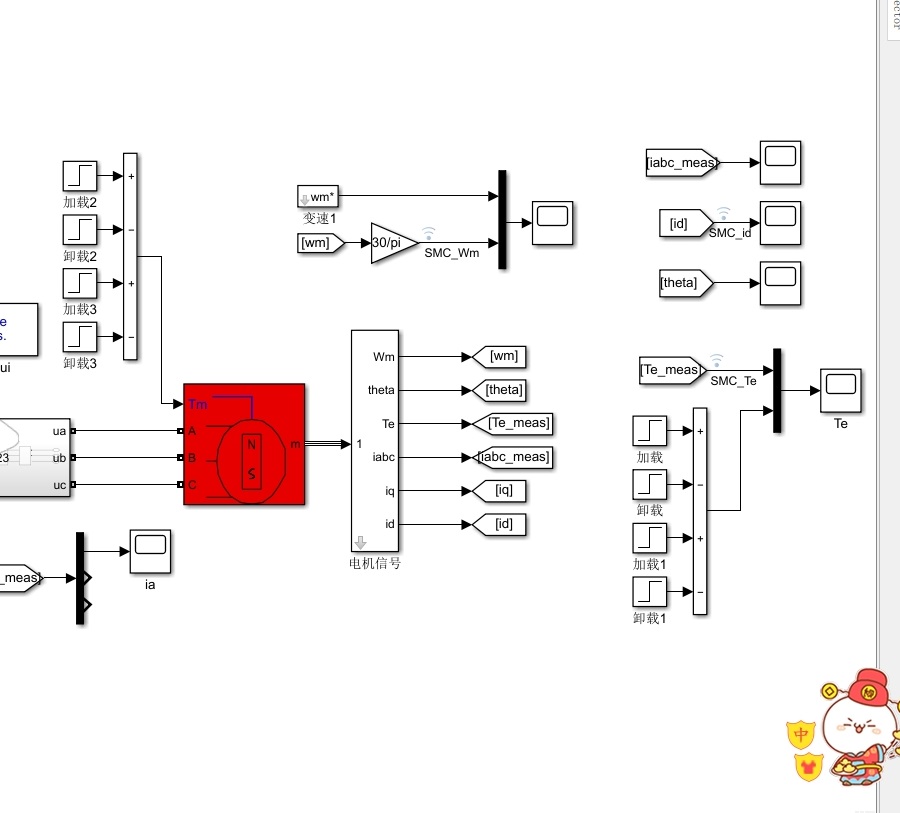
四、电流环预测控制的双矢量改进算法
预测控制是一种基于模型的控制策略,通过预测的未来行为来制定当前的控制策略。在本文中,我们采用了双矢量改进算法来实现电流环的预测控制。该算法利用电机的数学模型和电流环的实际运行情况,计算出最优的控制矢量,并通过滑模控制器来调整电机的实际运行状态。这样,不仅可以提高电流环的响应速度和准确性,还可以降低对外部扰动的敏感性。
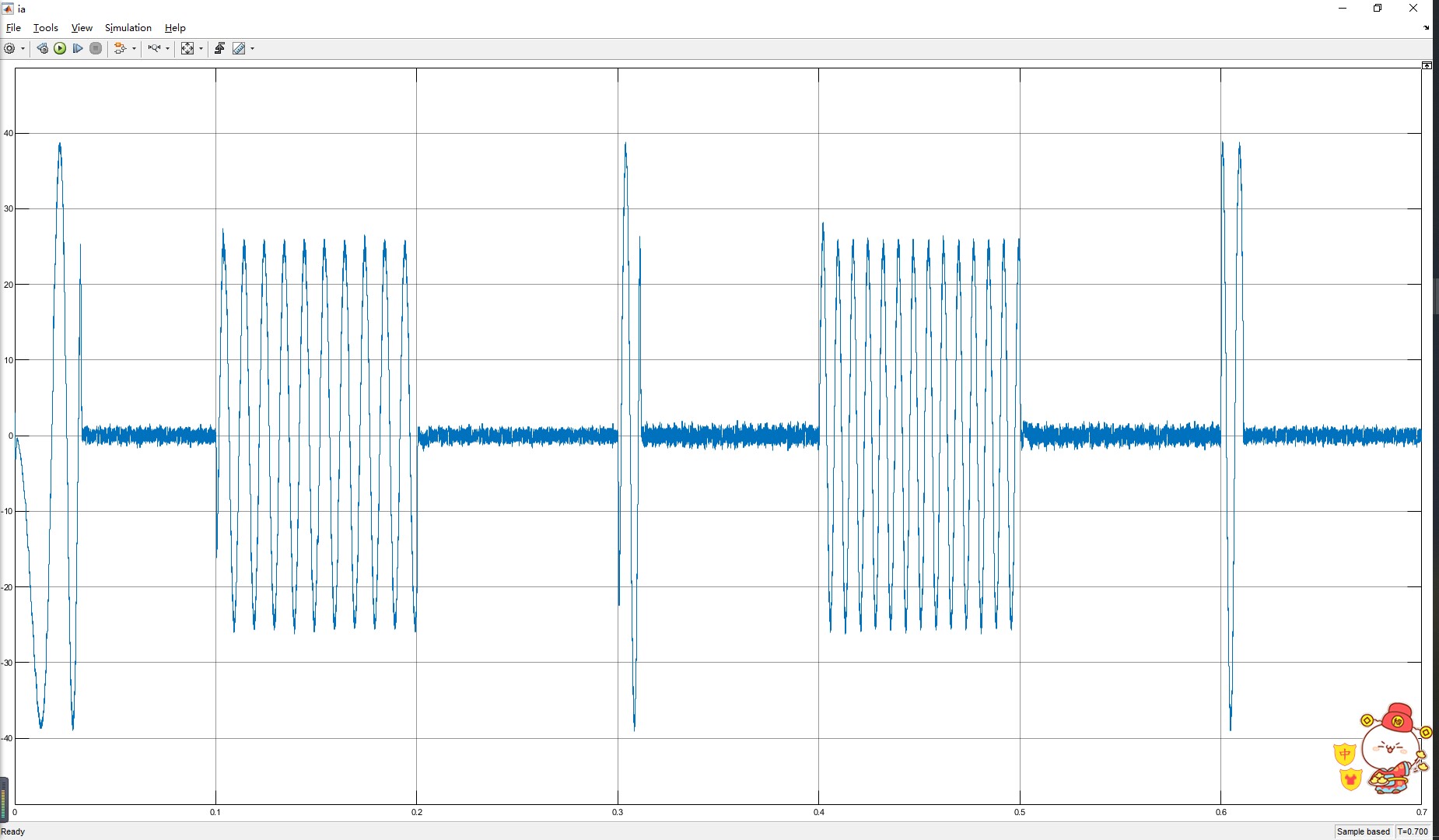
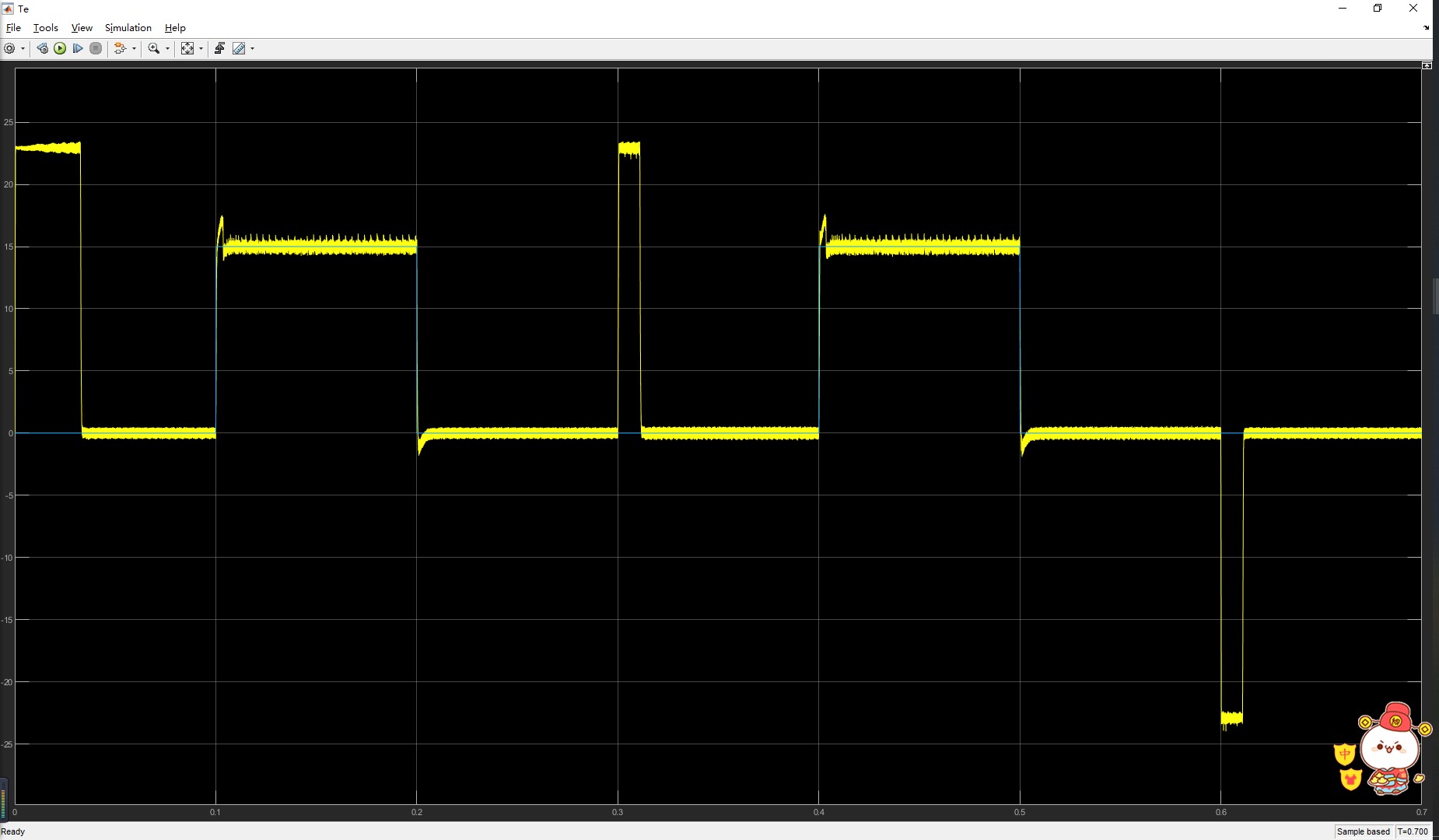
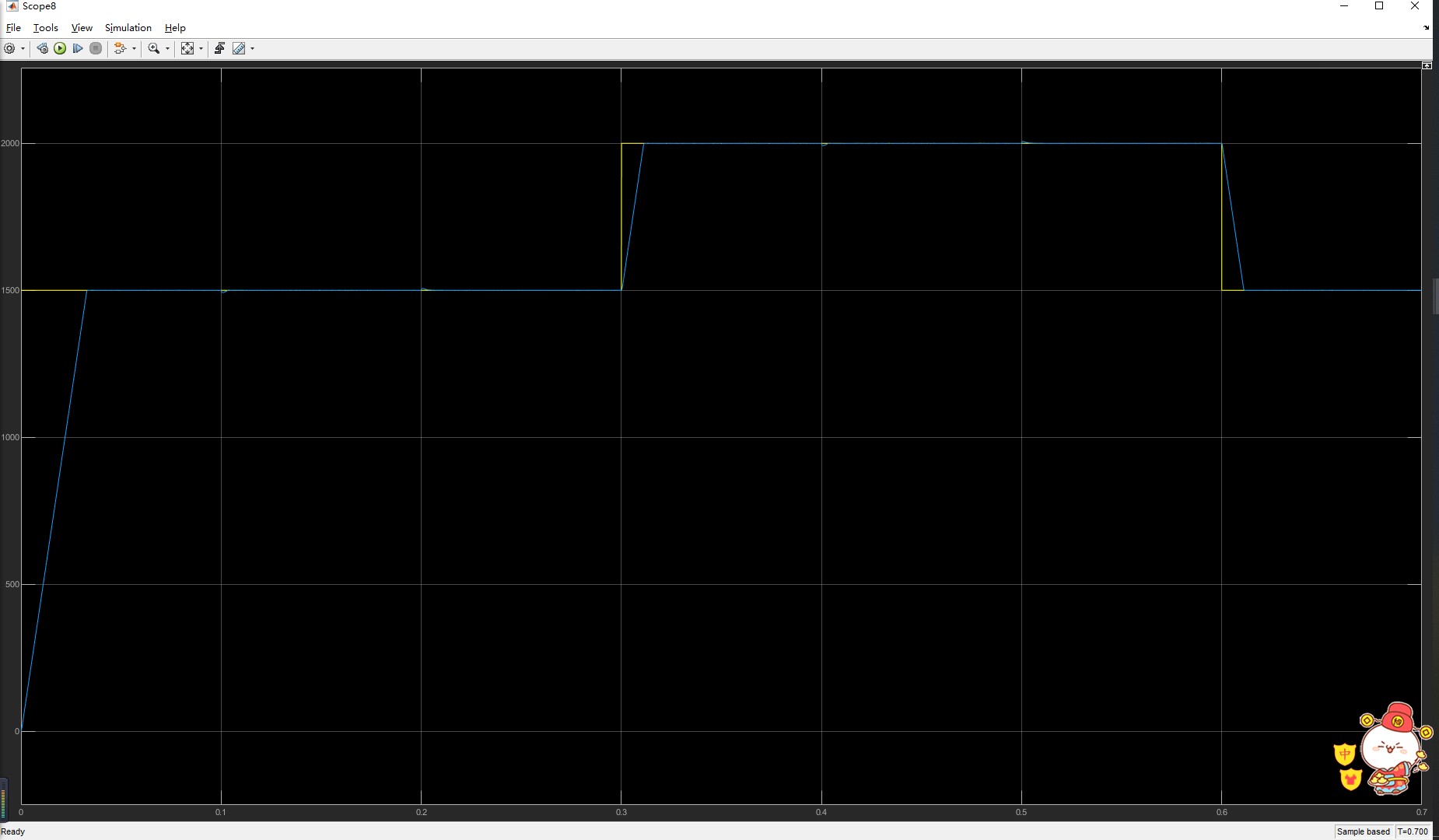
五、实验结果与分析
为了验证上述控制策略的有效性,我们进行了实验测试。实验结果表明,采用新型趋近律和扰动观测器的滑模控制策略能够显著提高PMSM的鲁棒性和稳态特性。同时,双矢量改进算法的预测控制在电流环中取得了良好的效果,不仅提高了响应速度和准确性,还降低了对外部扰动的敏感性。
六、学习文献与结论
本文所涉及的控制策略已经在多篇学术文献中得到研究和验证。我们引用了其中几篇具有代表性的文献,供读者进一步学习和参考。总之,通过结合滑模控制和预测控制的双矢量改进算法,我们可以实现PMSM的高性能电流控制,为电机控制领域的研究和应用提供了新的思路和方法。
(示例代码部分)
以下是使用MATLAB语言编写的滑模控制器部分代码:
function sliding_mode_controller(system_state, reference_state, system_parameters)
% 计算新型趋近律下的滑模面上的误差
error = system_state - reference_state;
% 结合扰动观测器信息调整趋近律参数
approach_law_parameters = ... % 根据扰动观测器信息计算出的参数
sliding_mode_surface = error * approach_law_parameters;
% 生成滑模控制器输出
control_output = sliding_mode_control_algorithm(sliding_mode_surface, system_parameters);
return control_output;
end
七、结语与展望
本文介绍了滑模控制和预测控制在永磁同步电机电流控制中的应用,并详细阐述了新型趋近律和扰动观测器的设计方法和实验结果。未来我们将继续研究如何进一步提高的鲁棒性和稳态特性,以及如何将这种控制策略应用于更广泛的电机控制领域中。
















 649
649

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









