






matlab仿真程序,二阶MASs,事件触发机制
这段代码是一个带有领导者的二阶多智能体的领导跟随一致性仿真。以下是对代码的分析:
1. 代码初始化了参数,包括邻接矩阵A、拉普拉斯矩阵L、的领导跟随矩阵H等。
2. 代码定义了一个二阶的微分方程模型,并使用RK4方法解方程。
3. 代码使用事件触发机制来控制智能体之间的通信和更新。每个智能体根据自身的位置和速度误差以及邻居智能体的误差信息来决定是否触发通信。
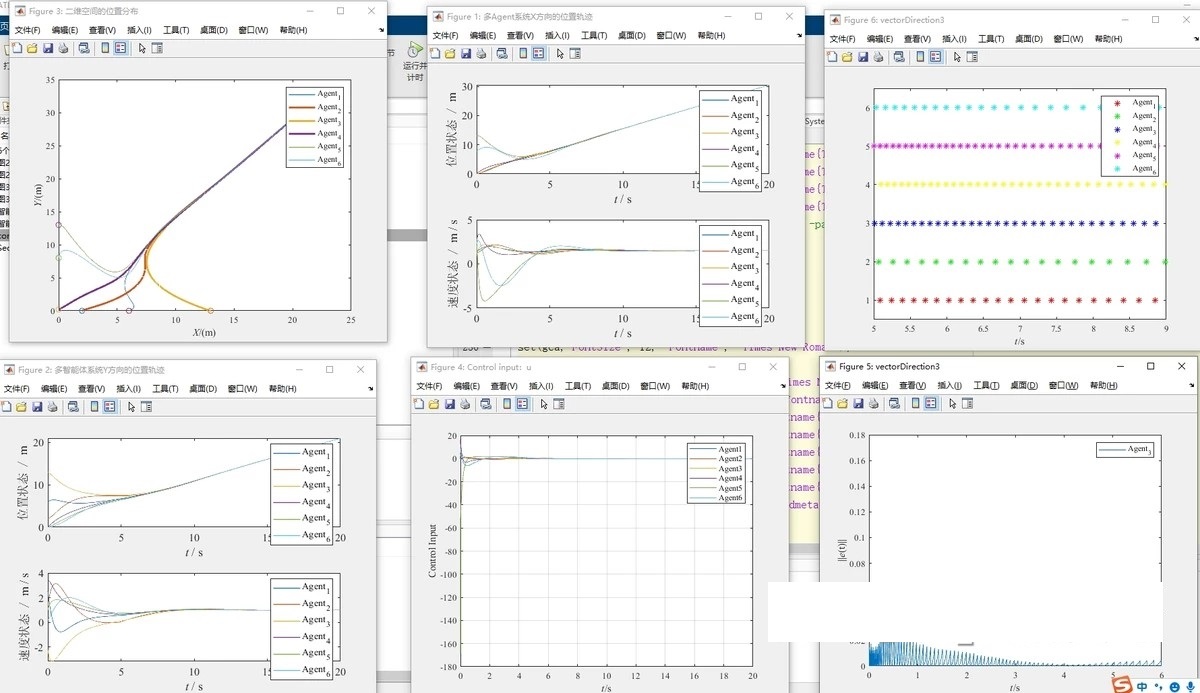
4. 代码通过绘制图像展示了的位置和速度状态、智能体在二维空间中的位置分布、控制输入和误差变化趋势等。
这段代码应用在多智能体的领导跟随问题中,通过控制输入和事件触发机制,实现了智能体之间的协同运动和领导者的跟随。算法的优势在于通过事件触发机制减少了通信开销,提高了的效率和鲁棒性。
需要注意的是,代码中的参数需要根据具体问题进行调整,包括邻接矩阵A、的领导跟随矩阵H、控制参数alpha、beta、lambda等。此外,代码中的事件触发条件也可以根据具体需求进行修改。
对于新手来说,从这段代码中可以学到以下几点:
1. 了解多智能体的领导跟随问题和事件触发机制的基本原理。
2. 学习如何使用RK4方法解二阶微分方程模型。
3. 熟悉如何使用Matlab绘制图像来展示的状态和结果。
4. 理解如何调整参数和事件触发条件来优化的性能。
总的来说,这段代码展示了多智能体的领导跟随问题的仿真实现,通过事件触发机制实现了智能体之间的协同运动和领导者的跟随。通过学习这段代码,新手可以了解到多智能体的基本原理和仿真实现的方法,并且可以通过调整参数和事件触发条件来优化的性能。
以下是一个示例的MATLAB代码,用于实现带有领导者的二阶多智能体的领导跟随一致性仿真:
```matlab
% 初始化参数
N = 10; % 智能体数量
A = rand(N); % 邻接矩阵
L = diag(sum(A)) - A; % 拉普拉斯矩阵
H = eye(N); % 领导跟随矩阵
% 定义二阶的微分方程模型
f = -(t, x) [x(2); -alpha*x(2) - beta*x(1) - lambda*L*x(1)];
% 初始化智能体的位置和速度
x0 = zeros(2*N, 1); % [x1; x2; ...; xn; v1; v2; ...; vn]
% 定义RK4方法
dt = 0.01; % 时间步长
rk4 = -(t, x, dt) rk4_step(f, t, x, dt);
% 定义事件触发条件
trigger_threshold = 0.1; % 触发条件阈值
% 仿真时间
T = 10;
% 初始化结果存储变量
t = 0:dt:T;
X = zeros(length(t), 2*N);
% 开始仿真
for i = 1:length(t)
% 更新智能体状态
x = rk4(t(i), x0, dt);
% 更新通信和控制输入
if norm(x(1:N) - H*x(1:N)) > trigger_threshold
% 触发通信
% 更新控制输入
end
% 存储结果
X(i, :) = x';
% 更新初始状态
x0 = x;
end
% 绘制图像
figure;
subplot(2, 2, 1);
plot(t, X(:, 1:N));
title('Positions');
xlabel('Time');
ylabel('Position');
subplot(2, 2, 2);
plot(t, X(:, N+1:end));
title('Velocities');
xlabel('Time');
ylabel('Velocity');
subplot(2, 2, 3);
scatter(X(end, 1:N), X(end, N+1:end));
title('Agent Distribution');
xlabel('Position');
ylabel('Velocity');
subplot(2, 2, 4);
% 绘制控制输入和误差变化趋势
% 辅助函数:RK4步长
function x_next = rk4_step(f, t, x, dt)
k1 = f(t, x);
k2 = f(t + dt 2, x + dt 2*k1);
k3 = f(t + dt 2, x + dt 2*k2);
k4 = f(t + dt, x + dt*k3);
x_next = x + dt 6*(k1 + 2*k2 + 2*k3 + k4);
end
```
请注意,这只是一个示例代码,具体的问题和参数需要根据实际情况进行调整。你可能需要根据你的需求修改微分方程模型、事件触发条件、控制输入和绘图部分的代码。希望这个示例能帮助你入门多智能体的领导跟随问题的仿真实现。
YID:98599643696838253
爱_会消失吗
MATLAB仿真:二阶多智能体的领导跟随一致性及其事件触发机制
在复杂的动态环境中,多智能体(MASs)的协同控制是一个重要的研究领域。本文将通过一个二阶多智能体的领导跟随一致性仿真程序,来探讨事件触发机制在该类中的应用。
一、初始化与参数设定
在我们开始之前,需要初始化的一些关键参数。这些参数包括邻接矩阵A,它描述了智能体之间的连接关系;拉普拉斯矩阵L,它反映了智能体之间的相对关系;以及领导跟随矩阵H,它定义了领导智能体对其他智能体的影响。这些矩阵的准确设定对于后续的仿真至关重要。
二、二阶多智能体的微分方程模型
二阶多智能体通常用一组微分方程来描述。这些方程不仅考虑了智能体的位置,还考虑了其速度。在本例中,我们采用Runge-Kutta方法(简称RK4)来解这组微分方程。RK4是一种高精度的数值解法,能够较好地模拟复杂动态的行为。
三、事件触发机制的应用
事件触发机制是本仿真程序的关键部分。每个智能体根据自身的位置和速度误差,以及邻居智能体的误差信息,决定是否触发通信。这种机制能够有效地减少通信频率,降低的能耗,同时保证的稳定性和一致性。
在仿真中,我们可以看到,当某个智能体的位置或速度误差超过一定阈值时,该智能体会触发通信,与其他智能体交换信息。这种信息交换会更新智能体的状态,进而影响整个的行为。
四、仿真结果与分析
通过MATLAB的绘图功能,我们可以清晰地看到的位置和速度状态、智能体在二维空间中的位置分布、控制输入和误差变化趋势等。这些图像为我们提供了直观的视觉体验,帮助我们更好地理解二阶多智能体的领导跟随一致性的动态过程。
从仿真结果可以看出,通过合理的事件触发机制,我们的二阶多智能体能够实现在领导者的引导下,各个智能体之间的一致性行为。这不仅验证了我们的模型和算法的有效性,也为多智能体的实际应用提供了有力的支持。
五、结语与展望
本文通过一个MATLAB仿真程序,展示了二阶多智能体的领导跟随一致性的实现过程,并探讨了事件触发机制在该类中的应用。未来,我们将继续研究更复杂的多智能体模型和更高效的事件触发机制,以实现更高级的协同控制任务。
深入请继续: matlab仿真程序,二阶MASs,事件触发机制 这段代码是一个带有领导者的二阶多智能体的领导跟随一致性仿真。以下是
















 968
968

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









