






1.Ethercat是单主站,Can是多主砖
2.can是差分信号,用两根线来表示,High和Low都是2.5v则是逻辑0,一个3.5一个1.5则是1
3.CanOpen采用CAN总线作为底层物理层,支持多个节点同时进行通信,适用于中小型设备的控制与通信;相反,EtherCAT使用以太网作为底层物理层,支持对设备实行分布式实时控制,在大型系统应用更具优势
4.线程的进程的区别:线程是并行的最小单位,一个进程可以多个线程,一个任务是一个进程。单核cpu每次智能执行一个线程。
5.关于Can总线 是差分信号 半双工
6.RS485 和232 都是一种电气电平标准 r是推荐的意思 S是标准 根TTL是一个水平的,一种电平判断标准
7,I2c 和spi都是串行通信 SPI需要4条信号线 有片选 输入 输出 时钟 i2c就两条
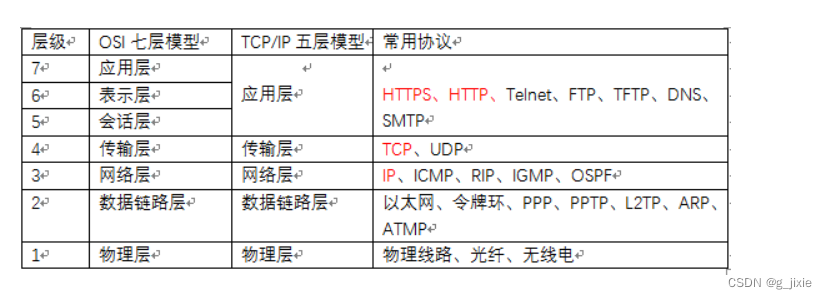
8.can 和ethercat都是属于应用层的
9。OSI模型和 TCP/IP模型是不一样的,现在用OSI的比较多。
10.子网掩码是划分 ip里的网络部分和主机部分的,255.255.255.0就是前24位都是网络部分,后8位是主机部分。如何是255.255.0.0那可能此网内就不止 有124个主机了。















 2093
2093











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









