






原帖地址:http://blog.sina.com.cn/s/blog_408540af0100avnv.html
Matlab模糊控制工具箱为模糊控制器的设计提供了一种非常便捷的途径,通过它我们不需要进行复杂的模糊化、模糊推理及反模糊化运算,只需要设定相应参数,就可以很快得到我们所需要的控制器,而且修改也非常方便。下面将根据模糊控制器设计步骤,一步步利用Matlab工具箱设计模糊控制器。
首先我们在Matlab的命令窗口(command window)中输入fuzzy,回车就会出来这样一个窗口。

下面我们都是在这样一个窗口中进行模糊控制器的设计。
1.确定模糊控制器结构:即根据具体的系统确定输入、输出量。
这里我们可以选取标准的二维控制结构,即输入为误差e和误差变化ec,输出为控制量u。注意这里的变量还都是精确量。相应的模糊量为E,EC和U,我们可以选择增加输入(Add Variable)来实现双入单出控制结构。

2.输入输出变量的模糊化:即把输入输出的精确量转化为对应语言变量的模糊集合。
首先我们要确定描述输入输出变量语言值的模糊子集,如{NB,NM,NS,ZO,PS,PM,PB},并设置输入输出变量的论域,例如我们可以设置误差E(此时为模糊量)、误差变化EC、控制量U的论域均为{-3,-2,-1,0,1,2,3};然后我们为模糊语言变量选取相应的隶属度函数。
在模糊控制工具箱中,我们在Member Function Edit中即可完成这些步骤。首先我们打开Member Function Edit窗口.


然后分别对输入输出变量定义论域范围,添加隶属函数,以E为例,设置论域范围为[-3 3],添加隶属函数的个数为7.

然后根据设计要求分别对这些隶属函数进行修改,包括对应的语言变量,隶属函数类型。

3.模糊推理决策算法设计:即根据模糊控制规则进行模糊推理,并决策出模糊输出量。
首先要确定模糊规则,即专家经验。对于我们这个二维控制结构以及相应的输入模糊集,我们可以制定49条模糊控制规则(一般来说,这些规则都是现成的,很多教科书上都有),如图。

制定完之后,会形成一个模糊控制规则矩阵,然后根据模糊输入量按照相应的模糊推理算法完成计算,并决策出模糊输出量。
4.对输出模糊量的解模糊:模糊控制器的输出量是一个模糊集合,通过反模糊化方法判决出一个确切的精确量,凡模糊化方法很多,我们这里选取重心法。

5.然后Export to disk,即可得到一个.fis文件,这就是你所设计的模糊控制器。
>>http://blog.sina.com.cn/xianfa110
======================================================================================
MATLAB功能强大,很多同学用其做控制算法的仿真
但是其中的fuzzy logic controller刚开始用常常容易出错
常见报错:
1、MinMax blocks do not accept 'boolean' signals. The input signal(s) of block 'mkkzq1/Subsystem/Fuzzy Logic Controller with Ruleviewer/Fuzzy Logic Controller/FIS Wizard/Defuzzification1/Max (COA)' must be one of the MATLAB 'uint8', 'uint16', 'uint32', 'int8', 'int16', 'int32', 'single', or 'double' data types
2、An error occurred while propagating data type 'boolean' from block 'mkkzq1/Subsystem/Fuzzy Logic Controller with Ruleviewer/Fuzzy Logic Controller/FIS Wizard/Defuzzification1/Zero Strength (COA)', output port 1。
以下是解决方案:
1、fis编辑器(MATLAB的command window中键入fuzzy打开)中,建立好规则后,file-export-to workspace
2、对于7.0版本,simulink模型窗口菜单中,Simulation-Configuration Parameters-Implement logic signals as boolean data前面默认的勾选去掉
3.而对于6.5及以前版本,则是在SIMULATION -SIMULATION PARAMETERS-ADVANCED中将boolean logic signals选为off,强烈推荐用这个
用FIS(Mamdani)设计完模糊控制器之后,连接到控制系统中进行仿真,每次总出现这两个错误:
1)Block error Max(coa): MinMax blocks do not accept'boolean'signals.
2)block error Zero strength(coa):An error occurred while propagating data type'boolean'from block'....',outport 1
解决方案:
在simulink parameter中,找到advance选项卡,把第一二个选项设为off。
====================================================================================
matlab/simulink模糊控制器应用实例
前面我们已经利用模糊控制工具箱设计好了一个模糊控制器(假定我们存为fuzzy1.fis),下面我们检验一下,看看我们的控制器到底怎么样。以一个简单的电机控制为例,我们在Simulink中建立了它的模糊控制系统如下:

在用这个控制器之前,需要用readfis指令将fuzzy1.fis加载到matlab的工作空间,比如我们用这样的指令:myFLC=readfis(‘fuzzy1.fis’);就创建了一个叫myFLC的结构体到工作空间,并在fuzzy logic controller中参数设为:myFLC。
可以看到,在模糊控制器的输入和输出均有一个比例系数,我们叫它量化因子,它反映的是模糊论域范围与实际范围之间的比例关系,例如,模糊控制器输入输出的论域范围均为[-3,3],而实际误差的范围是[-10,10],误差变化率范围是[-100,100],控制量的范围是[-24,24],那么我们就可以算出量化因子分别为0.3,0.03,8。量化因子的选取对于模糊控制器的控制效果有很大的影响,因此要根据实际情况认真选取哦。
好,现在我们可以设定仿真步长,比如定步长的10ms,就可以运行了。
运行后,产生这样一个错误:
MinMax blocks do not accept 'boolean' signals. The input signal(s) of block 'test_fuzzy/Fuzzy Logic Controller/FIS Wizard/Defuzzification1/Max (COA)' must be one of the MATLAB 'uint8', 'uint16', 'uint32', 'int8', 'int16', 'int32', 'single', or 'double' data types
我想很多朋友做模糊控制的时候都会遇到这个情况。没关系,这里提供两个解决办法:
1.直接在Defuzzification1这个模块中的那个比较环节后加入数据类型转换模块,将boolean转化为double型,或者双击那个比较模块,选中show additional parameters,将输出数据类型改为specify via dialog,然后选uint(8)即可;但是在仿真之后,又会发现很多地方都存在这个问题,因此你不得不一个一个去修改,如果你不怕累的话。
2.第二个方法是最简单的,直接在simulation parameters->advanced将boolean logic signals选为off,强烈推荐你用这个。
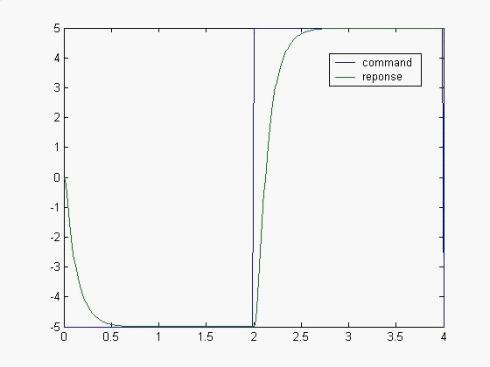
好了,这些都解决了,我们就可以仿真了,例如给个方波信号,可以得到仿真曲线如下















 4116
4116

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









