






其实我觉得要说四轴的姿态,我们必须说几样东西。
(1)坐标系
(2)方向余弦矩阵
(3)欧拉角
(4)四元数
对上面这四样东西有了初步的理解,就可以开始看IMU的飞控解算程序了。
其实我刚刚接触四轴的时候我没明白为什么四轴里面一会来个地理坐标系,一会来个机体坐标系。搞这么多坐标系干什么用的。后来在秦永元的书里面说了,由于运动的相对性,当我们研究一个运动对象的时候我们必须指明是相对哪个坐标系运动的。因此,针对不同的研究对象和具体任务,正确的选取不同的坐标系是十分必要的,这也是一种默认的习惯。
那么四轴是否就能够看做一个机体坐标系,而我们四轴在三维空间中的运动是不是就把它看做是相对于地理坐标系在运动。正是由于有这样一个关系在里面我们才会引入方向余弦矩阵,四元数。这些听起来高大上的名字其实说穿了只是用来表示坐标系之间的旋转。
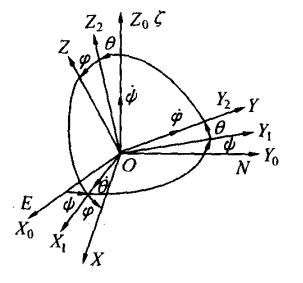
有了上面对于坐标系的铺垫,下面我们在谈谈方向余弦矩阵。说这个东西必须拿出一幅图
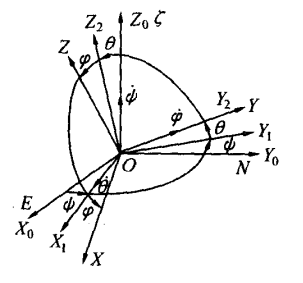
假设为参考坐标系,为机体坐标系,初始时刻两个坐标系重合,经过绕轴旋转度,绕轴旋转度,最后绕轴旋转度后转到它的新位置OXYZ,我们叫这三次小角度转动为欧拉角。其实所谓的欧拉角就是刚体绕坐标轴旋转的角度。
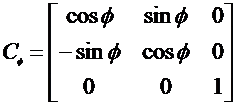
(1)绕轴旋转的方向余弦矩阵为
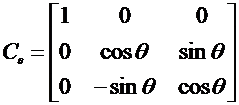
(2)绕轴旋转的方向余弦矩阵为
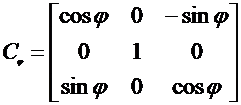
(3)绕轴旋转的方向余弦矩阵为
最后我们可以知道为参考坐标系经过的旋转可以转到XYX坐标系。
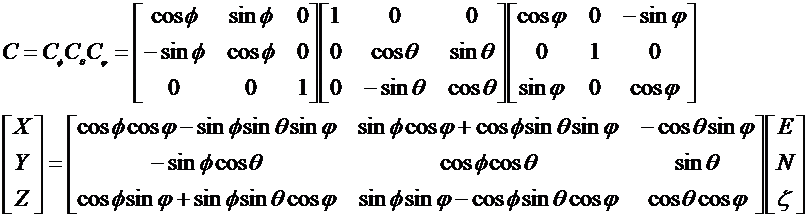
通过上面的一些描述我们就可以对方向余弦矩阵做一个总结。
方向余弦矩阵:这是对于坐标系之间相对转动的一种数学描述。
例如两个重合的坐标系,当一个坐标系相对另外一个坐标系做一次或者多次旋转以后得到另外一个新的坐标系,前者一般叫做固定坐标系,后者叫做动坐标系。而它们之间的这种转动关系就可以用方向余弦矩阵来表示。
上面把方向余弦矩阵和欧拉角的概念都说了,最后我们在谈谈四元数。
一直在说四元数这个东西,对于没有接触过的人这个概念可能有点陌生,下面我就为大家通俗的介绍这个东东。
先来点官方的概念介绍
根据秦永元惯性导航书本上面的知识
(1)四元数的数学定义
顾名思义,四元数就是由四个元构成的数:

其中,,q1,q2,q3都是实数,i,j,k均是相互正交的单位向量。
(2)四元数在四轴中的表达方式
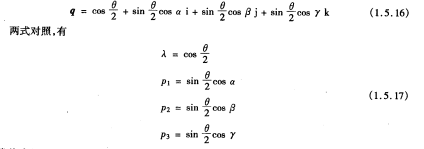
我们把上面这种表示方式称为特征四元数,其范数
,在四轴或者导航中所遇到的四元数均为特征四元数,在相关文献中,统称为四元数,不再另加说明。
好了,四元数的基本数学概念有了就行了,下面我们来说说四元数用来干什么,其实四元数的本质仍然表示的是坐标变换。它和我们上面介绍的方向余弦矩阵本质上说的是同一个东西。
同样的图我们用四元数来表示上面这个坐标系的旋转,可以用如下公式来表示

通过将上面的方向余弦矩阵和这里的四元数矩阵相互比较就可以求出欧拉角。
今天是第一次在CSDN上面发博客,如果有什么理解或者写的不对的,请大家多多指正。















 4177
4177

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









