







一、概念
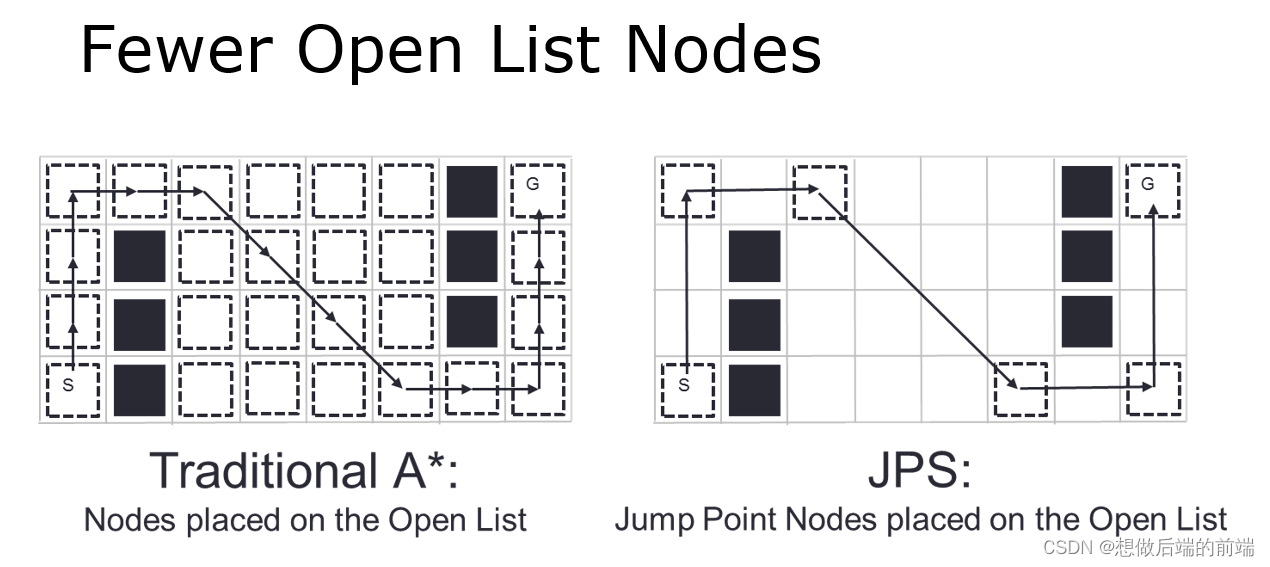
JPS(jump point search)算法实际上是对A* 寻路算法的一个改进,因此在阅读本文之前需要先了解A*算法。A* 算法在扩展节点时会把节点所有邻居都考虑进去,这样openlist中点的数量会很多,搜索效率较慢。(若不了解A*寻路算法,可以找我以往的文章)
例如在无遮挡情况下(往往会有多条等价路径),而我们希望起点到终点实际只取其中一条路径,而该路径外其它节点可以没必要放入openlist(不希望加入没必要的邻居)。
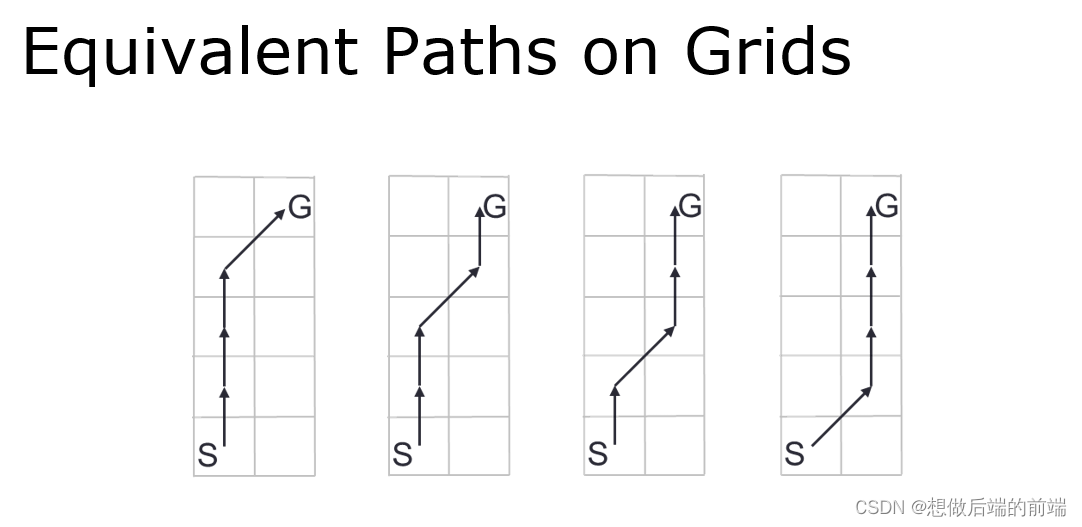
其次我们还希望直线方向上中途的点不用放入openlist,如果只放入每段直线子路径的起点和终点,那openlist又可以少放很多没必要的节点:
可以看到 JPS 算法搜到的节点总是“跳跃性”的,这是因为这些关键性的节点都是需要改变行走方向的拐点,因此这也是 Jump Point 命名的来历。
在介绍JPS等算法具体实现前,我们必须先掌握下面的概念。
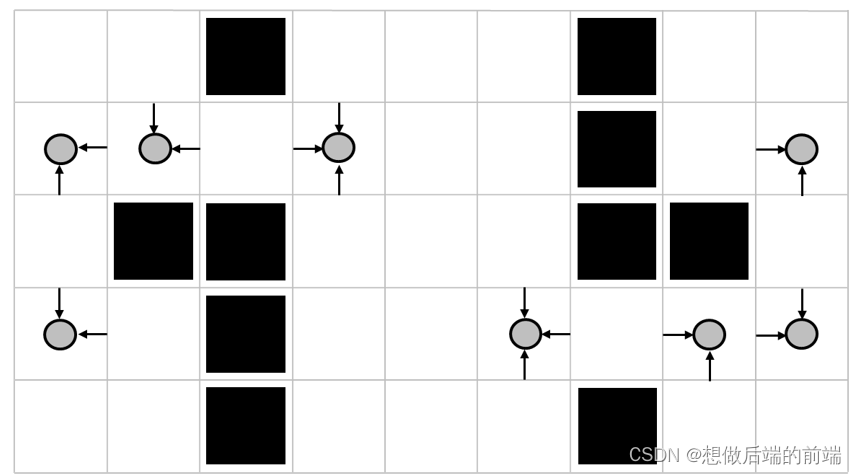
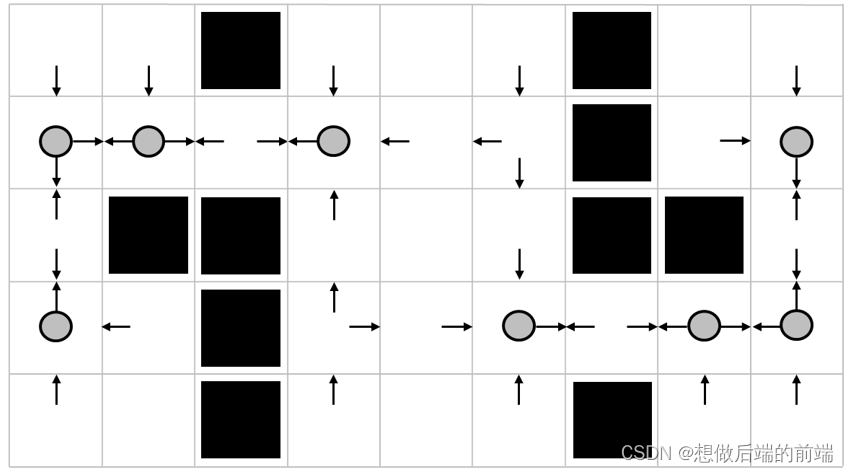
1.强迫邻居(Forced Neighbour)
强迫邻居:节点 x 的8个邻居中有障碍,且 x 的父节点 p 经过x 到达 n 的距离代价比不经过 x 到达的 n 的任意路径的距离代价小,则称 n 是 x 的强迫邻居。
看定义也许十分晦涩难懂。直观来说,实际就是因为前进方向(父节点到 x 节点的方向为前进方向)的某一边的靠后位置有障碍物,因此想要到该边靠前的空位有最短的路径,就必须得经过过 x 节点。
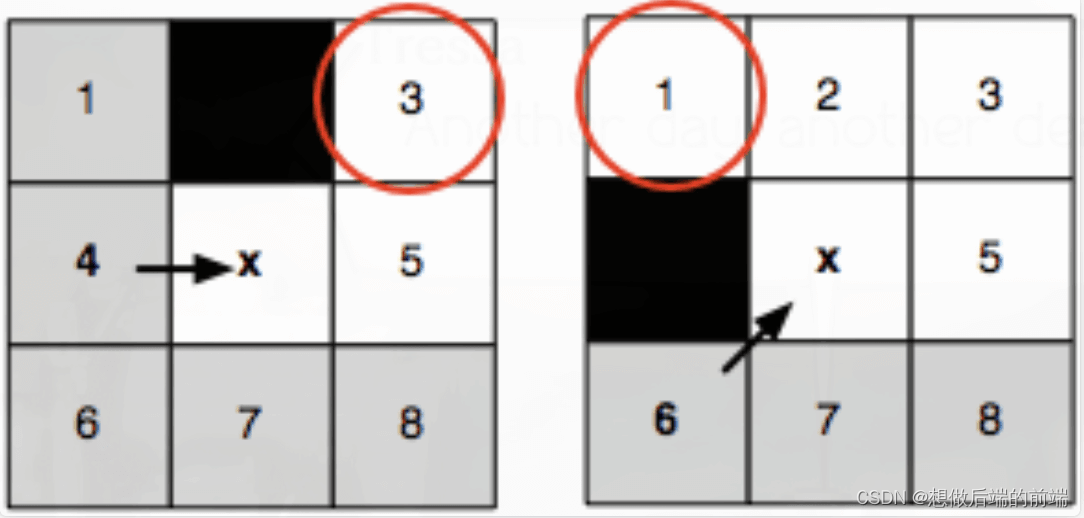
可能的情况见图示,黑色为障碍,红圈即为强迫邻居:(左图为直线方向情况下的强迫邻居,右图为斜方向情况下的强迫邻居)
2.跳点
跳点:当前点 x 满足以下三个条件之一:
- 节点 x 是起点/终点。
- 节点 x 至少有一个强迫邻居。
- 如果父节点在斜方向(意味着这是斜向搜索),节点x的水平或垂直方向上有满足条件a,b的点。
节点y的水平或垂直方向是斜向向量的拆解,比如向量d=(1,1),那么水平方向则是(1,0),并不会往左搜索,只会看右边,如果向量d=(-1,-1),那么水平方向是(-1,0),只会搜索左边,不看右边,其他同理。
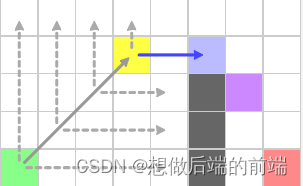
下图举个例子,由于黄色节点的父节点是在斜方向,其对应分解成向上和向右两个方向,因为在右方向发现一个蓝色跳点,因此黄色节点也应被判断为跳点:
简单来说就是在改变方向时的点。
二、JPS
1.实现原理
JPS 算法和A* 算法非常相似,步骤大概如下:
- openlist取一个权值最低的节点,然后开始搜索。(这些和A*是一样的)
- 搜索时,先进行 直线搜索(4/8个方向,跳跃搜索),然后再 斜向搜索(4个方向,只搜索一步)。如果期间某个方向搜索到跳点或者碰到障碍(或边界),则当前方向完成搜索,若有搜到跳点就添加进openlist。
- 若斜方向没完成搜索,则斜方向前进一步,重复上述过程
- 若所有方向已完成搜索,则认为当前节点搜索完毕,将当前节点移除于openlist,加入closelist。
- 重复取openlist权值最低节点搜索,直到openlist为空或者找到终点。
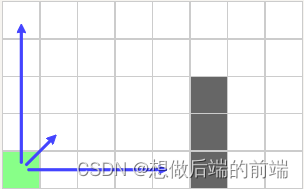
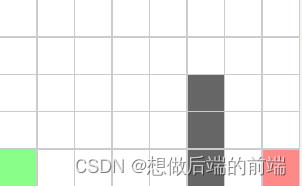
下面结合图片更好说明过程2和3:首先我们从openlist取出绿色的节点,作为搜索的开始,先进行直线搜索,再斜向搜索,没有找到任何跳点。
斜方向前进一步后,重复直线搜索和斜向搜索过程,仍没发现跳点。
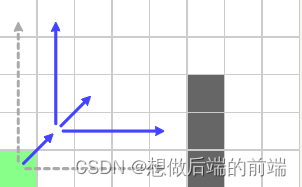
斜方向前进两步后,重复直线搜索和斜向搜索过程,仍没发现跳点。
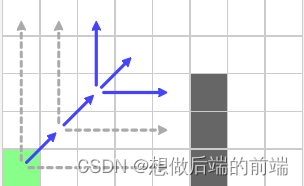
斜方向前进了三步后(假设当前位置为 x),在水平直线搜索上发现了一个跳点(紫色节点为强迫邻居)。
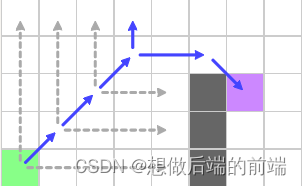
于是 x 也被判断为跳点,添加进openlist。斜方向结束,绿色节点的搜索过程也就此结束,被移除于openlist,放入closelist。

2.示例过程
下面展示JPS算法更加完整的过程:
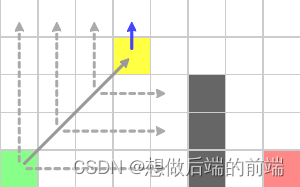
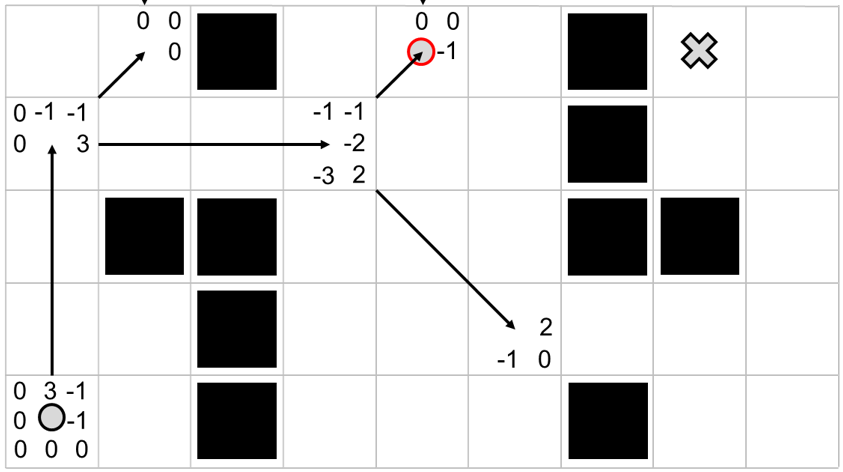
假设起点为绿色节点,终点为红色节点。
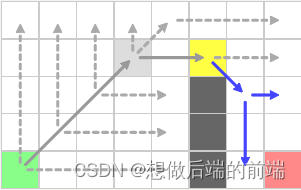
重复直线搜索和斜向搜索过程,斜方向前进了3步。在第3步判断出黄色节点为跳点(依据是水平方向有其它跳点),将黄色跳点放入openlist,然后斜方向搜索完成,绿色节点移除于openlist,放入closelist。
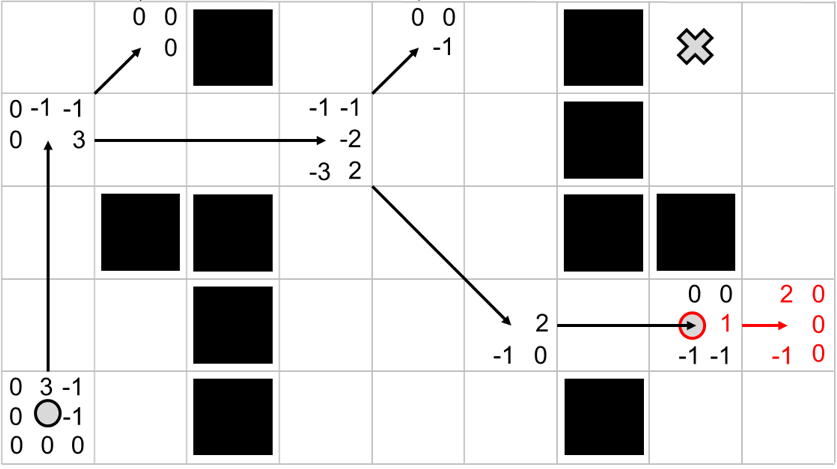
对openlist下一个权值最低的节点(即黄色节点)开启搜索,在直线方向上发现了蓝色节点为跳点(依据是紫色节点为强迫邻居),类似地,放入openlist。
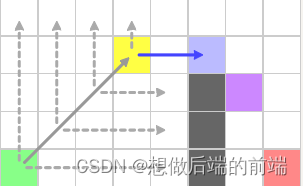
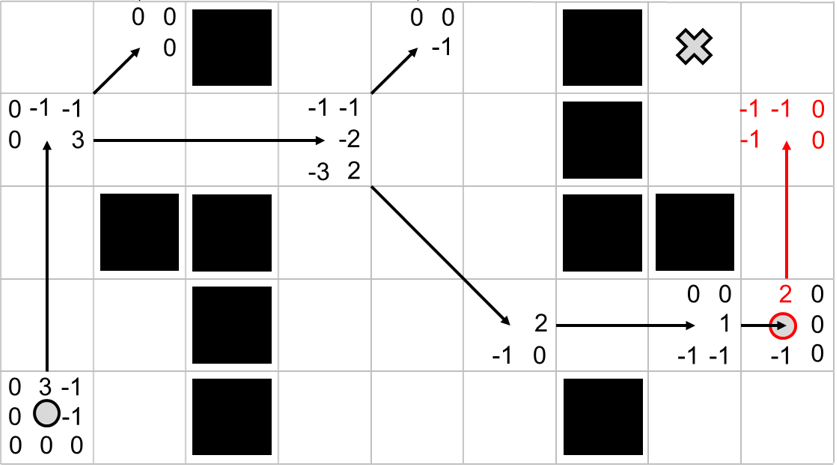
由于斜方向还没结束,继续前进一步。最后一次直线搜索和斜向搜索都碰到了边界,因此黄色节点搜索完成,移除于openlist,放入closelist。
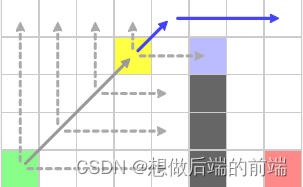
对openlist下一个权值最低的节点(原为蓝色节点,下图变为黄色节点)开启搜索,直线搜索碰到边界,斜向搜索无果。斜方继续前进一步,仍然直线搜索碰到边界,斜向搜索无果。
由于斜方向还没结束,继续前进一步。

最终在直线方向上发现了红色节点为跳点,因此蓝色节点先被判断为跳点,只添加蓝色节点进openlist。斜方向完成,黄色节点搜索完成。
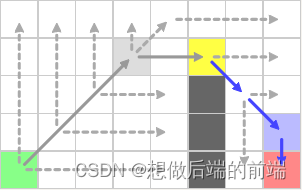
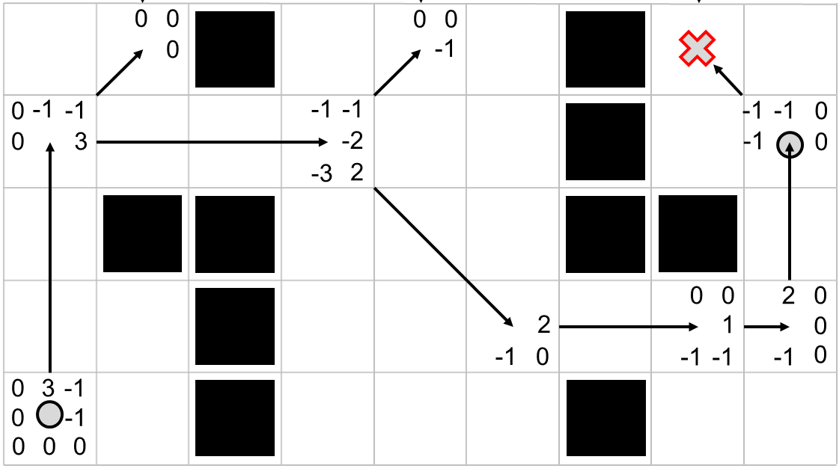
最后openlist取出的蓝色节点开启搜索,在水平方向上发现红色节点,判断为终点,算法完成。
三、JPS+(Jump Point Search Plus)
PS+ 本质上也是 JPS寻路,只是加上了预处理来改进,从而使寻路更加快速。
1.预处理
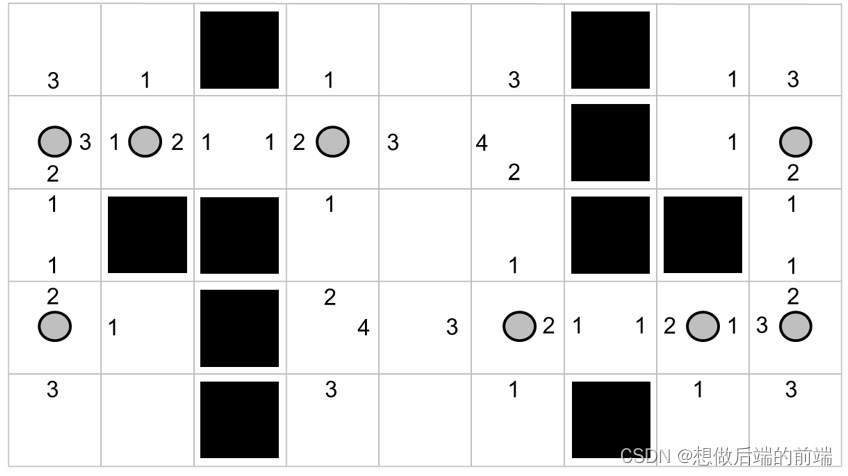
我们首先对地图每个节点进行跳点判断,找出所有主要跳点:
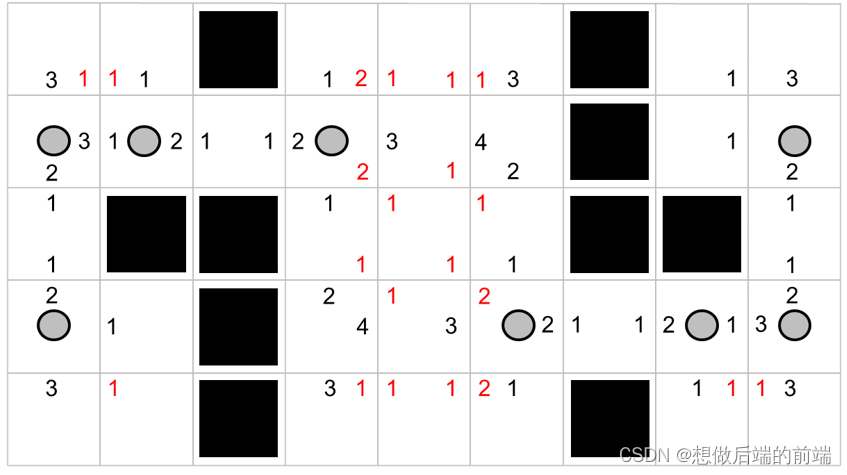
然后对每个节点进行跳点的直线可达性判断,并记录好跳点直线可达性:
若可达还需记录号跳点直线距离:
类似地,我们对每个节点进行跳点斜向距离的记录:
剩余各个方向如果不可到达跳点的数据记为0或负数距离。如果在对应的方向上移动1步后碰到障碍(或边界)则记为0,如果移动n+1步后会碰到障碍(或边界)的数据记为负数距离-n
最后每个节点的8个方向都记录完毕,我们便完成了JPS+的预处理过程:
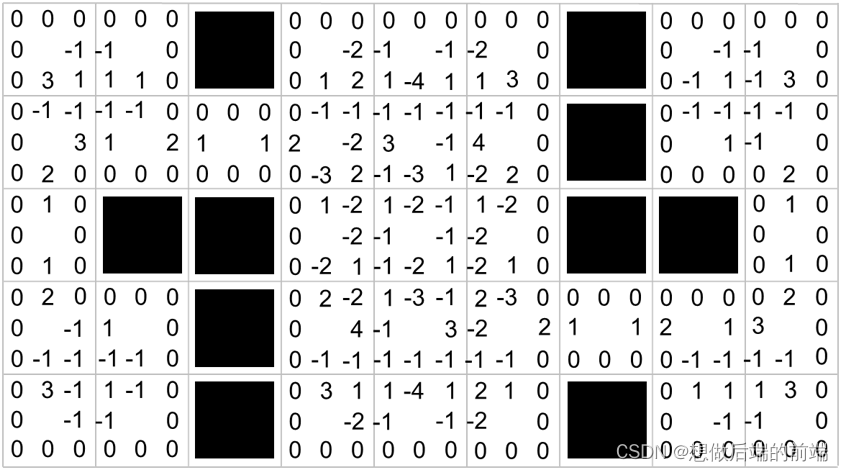
以上预处理过程需要有一个数据结构存储地图上每个格子8个方向距离碰撞或跳点的距离。
2.示例过程
做好了地图的预处理之后,我们就可以使用JPS+算法了。大致思路与JPS算法相同,不过这次有了预处理的数据,我们可以更快的进行直线搜索和斜向搜索。
在某个搜索方向上有:
- 对于正数距离 n(意味着距离跳点 n 格),我们可以直接将n步远的节点作为跳点添加进openlist
- 对于0距离(意味着一步都不可移动),我们无需在该方向搜索;
- 对于负数距离 -n(意味着距离边界或障碍 n 格),我们直接将n步远的节点进行一次跳点判断(有可能满足跳点的第三条件,不过得益于预处理的数据,这步也可以很快完成)
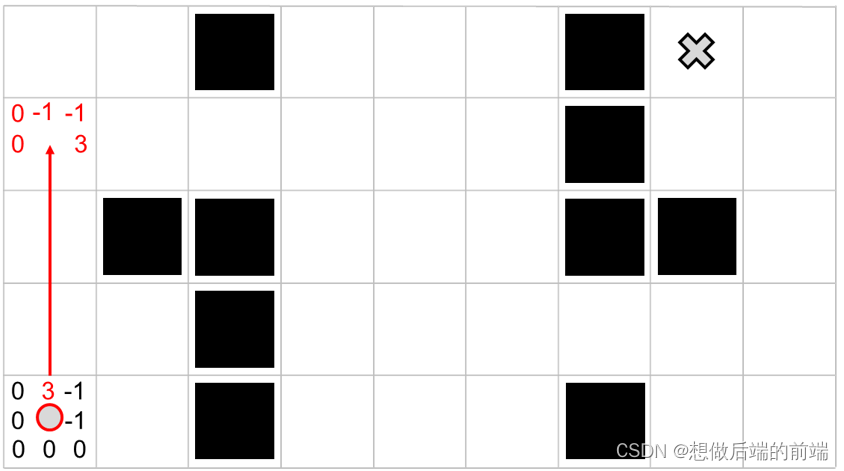
如下图示,起始节点通过已记录的向上距离,直接将3步远的跳点添加进openlist,而不再像以前需要迭代三步(还每步都要判断是否跳点):
其它过程也是类似的:
四、总结
可以看到 JPS/JPS+ 算法里只有跳点才会被加入openlist里,排除了大量不必要的点,最后找出来的最短路径也是由跳点组成。这也是 JPS/JPS+ 高效的主要原因。
JPS :
- 绝大部分地图,使用 JPS 算法都会比 A* 算法更快,内存占用也更小(openlist里节点少了很多)。
- JPS 在跳点判断上,要尽可能避免递归的深度过大(或者期待一下以后出现避免递归的算法),否则在超大型的地图里递归判断跳点可能会造成灾难。
- JPS 也可以用于动态变化的地图,只是每次地图改变都需要再进行一次 JPS 搜索。
- JPS 天生拥有合并节点(亦或者说是在一条直线里移除中间不必要节点)的功能,但是仍存在一些可以继续合并的地方。
- JPS 只适用于 网格(grid)节点类型,不支持 Navmesh 或者路径点(Way Point)。
JPS+ :
- JPS+ 相比 JPS 算法又是更快上一个档次(特别是避免了过多层递归判断跳点),内存占用则是每个格子需要额外记录8个方向的距离数据。
- JPS+ 算法由于包含预处理过程,这让它面对动态变化的地图有天生的劣势(几乎是不可以接受动态地图的),因此更适合用于静态地图。
- JPS+ 预处理的复杂度为 O(n) ,n 代表地图格子数。
| 算法 | 性能 | 内存占用 | 支持动态地图 | 预处理 | 支持节点类型 |
|---|---|---|---|---|---|
| A* | 中等 | 大 | 支持 | 无 | 网络,NavMesh,路径点 |
| JPS | 快 | 小 | 支持 | 无 | 网格 |
| JPS+ | 非常快 | 大 | 不支持 | 有 | 网格 |
综上,JPS/JPS+ 是A*算法的优秀替代者,绝大部分情况下更快和更小的内存占用已经足够诱人。在GDC 2015 关于 JPS+ 算法的演讲中,Steve Rabin 给出的数据甚至是比A* 算法快70~350倍。
















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











