






推荐开源项目:在线学习3D LiDAR人体分类跟踪框架
在这个快速发展的自动驾驶领域,实时、准确地识别和跟踪行人是一项至关重要的任务。今天,我们向您推荐一个创新的ROS(Robot Operating System)基于的开源项目——Online Learning for Human Classification in 3D LiDAR-based Tracking。该项目利用强大的多目标跟踪技术,实现了无需人工标注数据的人体分类在线学习。
项目介绍
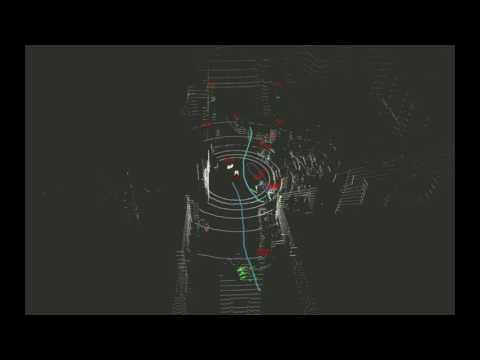
这个项目提供了一个框架,通过3D激光雷达(LiDAR)扫描实现对人体类别的在线学习和分类。它特别关注在追踪过程中如何避免依赖于人类专家的数据注释。项目作者已在视频中展示了其工作效果,详细说明了系统的运行流程和技术优势。
此外,该项目还为适应性聚类方法提供了独立的实现,可以在 adaptive_clustering 找到。
项目技术分析
项目的核心是在线学习算法,它能够结合实时的3D LiDAR数据进行训练,并逐步优化人类分类模型。这得益于多目标跟踪技术,可以有效地处理遮挡和重叠情况,确保跟踪稳定性。项目集成了以下关键技术:
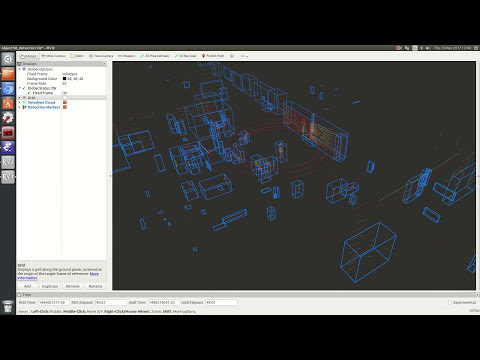
- 3D LiDAR扫描解析:将原始的velodyne_msgs/VelodyneScan消息类型转化为可理解的点云数据。
- 在线学习SVM:通过持续接收新样本来更新支持向量机(SVM)模型。
- 自适应聚类:动态地对LiDAR扫描中的点云进行分组,以识别潜在的目标对象。
应用场景
该技术适用于各种需要精确人体检测和跟踪的应用,特别是:
- 自动驾驶汽车的安全感知系统。
- 智能城市监控和安全解决方案。
- 工业自动化环境中的机器人导航。
项目特点
- 免人工注释:通过在线学习,减少对大量人工标注数据的依赖。
- 实时性能:设计用于实时处理3D LiDAR数据,满足实际应用的需求。
- 模块化设计:易于集成其他感知或追踪系统,具备很好的扩展性。
- ROS兼容:使用ROS开发,方便与现有机器人平台集成。
要开始使用该项目,请遵循提供的安装和构建指南,并参考项目文档。让我们一起探索3D LiDAR人体分类跟踪的无限可能性!

![]()
如果你在项目中受益,别忘了引用相关文献,以支持作者的研究工作:
@inproceedings{yz17iros,
author = {Zhi Yan and Tom Duckett and Nicola Bellotto},
title = {在线学习在3D LiDAR-based跟踪中的人类分类},
booktitle = {2017 IEEE/RSJ国际智能机器人与系统会议(IROS)论文集},
pages = {864--871},
address = {加拿大温哥华},
month = {九月},
year = {2017}
}
















 184
184

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











