







- 作者顾工首先,添加一个CPU,直接添加一个1518T,反正仿真,不用最好的干嘛呢。是吧。当然,你也可以添加一个你喜欢的PLC,这里不强求。
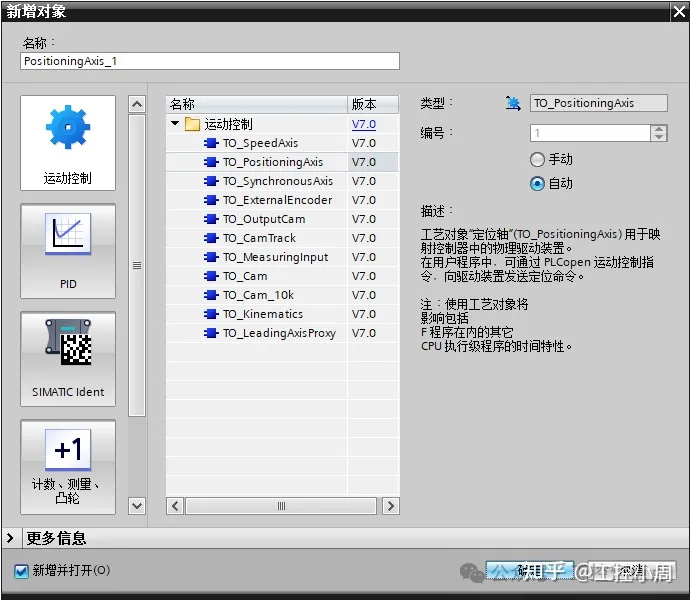
- 然后添加工艺对象,我们简单添加一个定位轴。
在工艺对象,新增对象,运动控制,添加一个TO_PositioningAxis,如下图
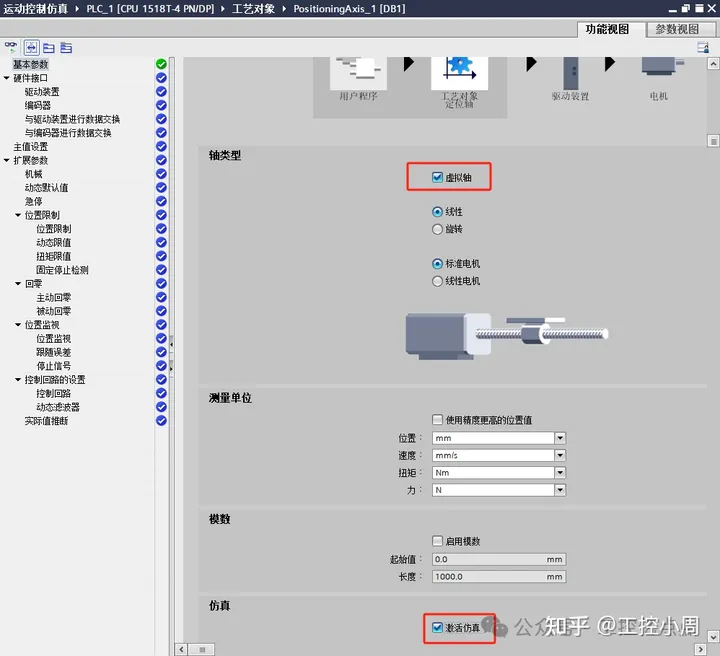
- 然后对这个定位轴组态。具体数据如下图。
也就是修改以下基本参数。
勾选虚拟轴,再勾选激活仿真。其他参数的话,可以根据自己的工况进行设置。这里偷个懒,我就用默认参数了。
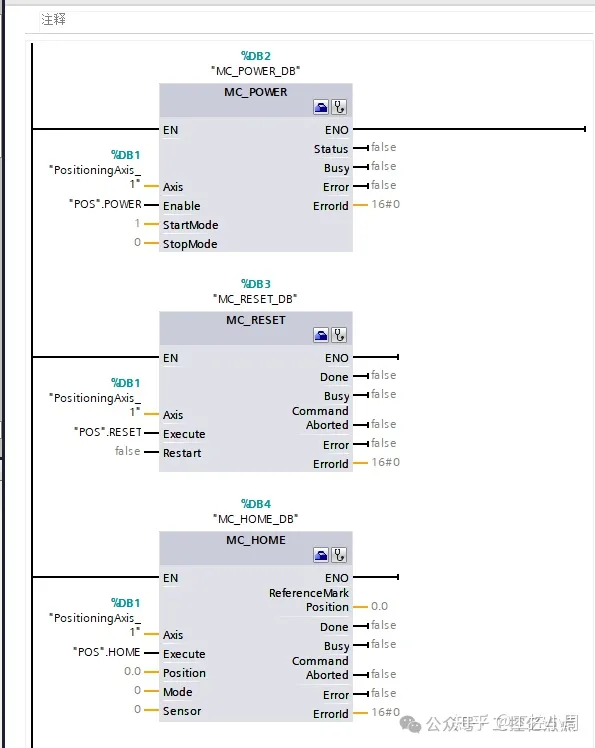
- 然后就是编程了。
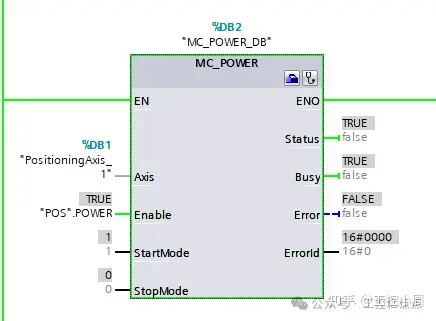
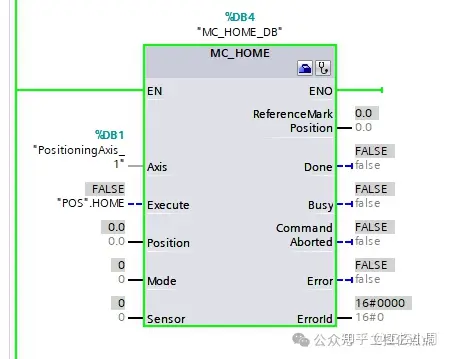
添加一个MC_POWER,MC_RESET,MC_HOME三大件。这是控制轴用的。
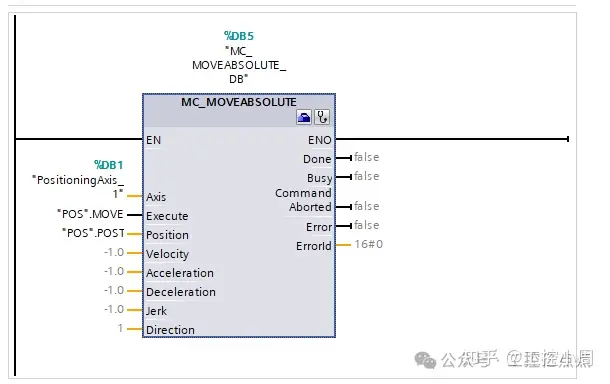
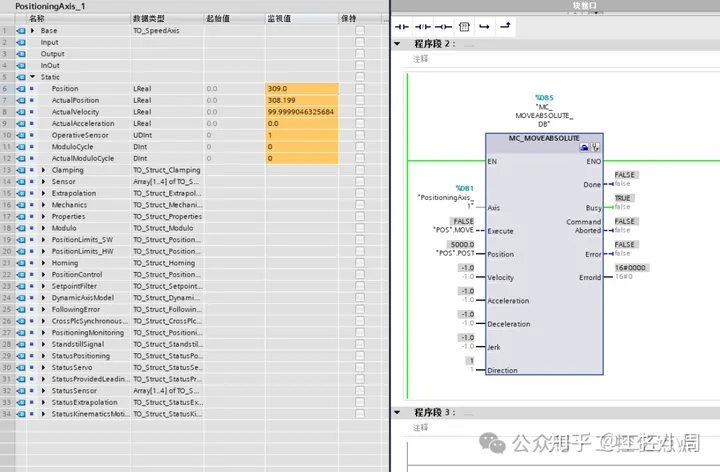
- 再写一个绝对定位。
添加一个MC_MOVEABSOLUTE,这个是对轴进行绝对定位用的。
- 然后就是下载到PLC,仿真测试。
首先,我们需要启用轴。
- 然后,有错误的复位错误,没错误的话,直接回零。
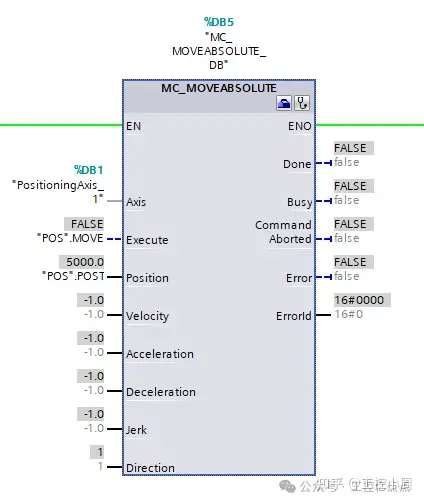
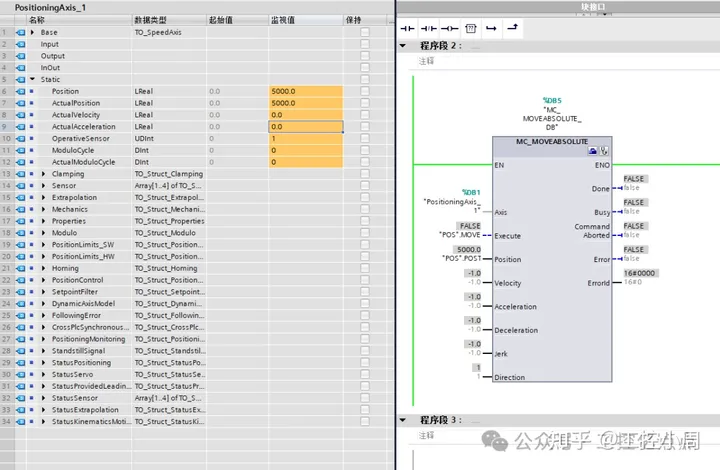
- 然后准备就绪之后,我们开始运动控制。让轴移动到5000的位置。
设定好位置,然后我们点击execute,轴就开始运动了。
- 此时我们可以打开轴的DB块,可以看到轴的一些参数
比如当前位置,运动速度等等
- 运动完成,通过轴的DB块可以看到当前已经运动到5000的位置
- 我们也可以通过调试面板控制这个虚拟轴,调试的时候需要取消MC_POWER的控制。大家应该都知道。
从轴控界面也可以看到很多的轴参数,也可以操作轴,比如让轴绝对运动,点动,回零等等
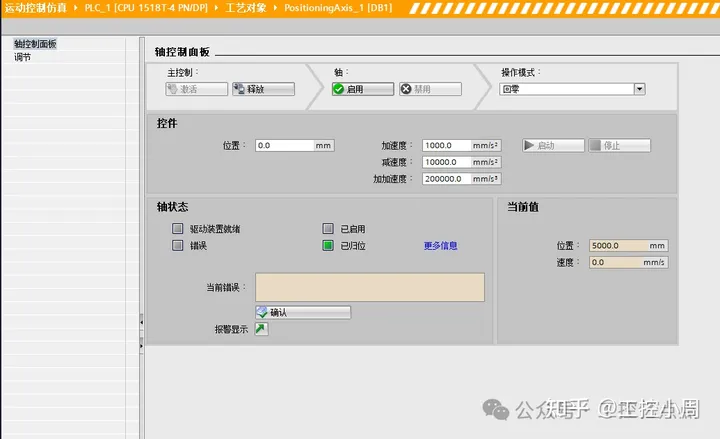

- 比如说绝对定位到5000的位置

西门子TIA博途
西门子TIA博途
3.使用PLCSIM Advanced仿真博途Modbus_TCP
4.使用PLCSIM Advanced仿真博途S7-1500 OPC UA
西门子TIA博途SCL学习
1.西门子PLC用TIA博途SCL语言写的一个产生随机实数的指令块(学习1)
2.
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









