








目录
基础理论
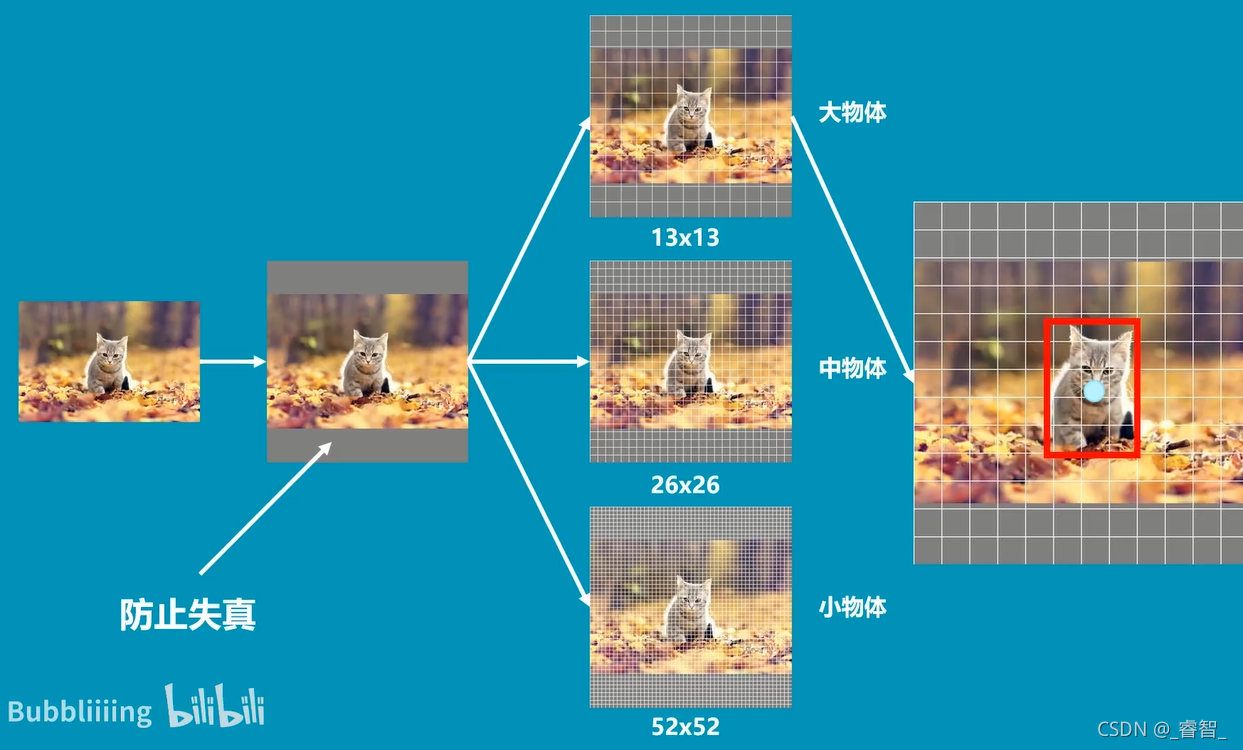
图像被划分成3个图像:
图像在多次卷积压缩后,小物体容易消失,所以我们分别用52*52、26*26、13*13的网格检测小物体、中物体、大物体。
(猫是大物体,所以用13*13的网格检测)

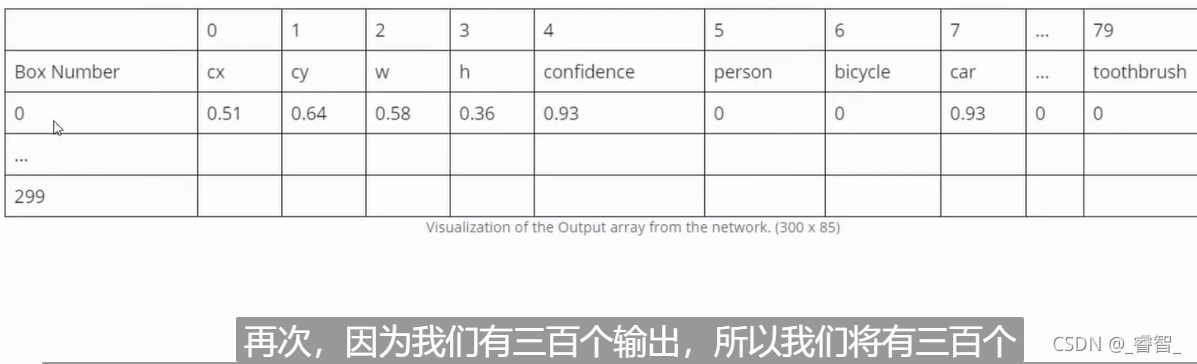
输出层output:

一、 读取文件
需要三个文件:
coco.names、yolov3.cfg、yolov3.weights。
下载地址:
https://download.csdn.net/download/great_yzl/34365174
(也可以去yolo官网下载,不过coco.names文件不知道有没有)
yolov3.cfg、yolov3.weights都是官方给定的模型(已经设置训练好的,直接拿来用即可)。
# 读取文件
def ReadFile():
global name_list
name_list = []
# 读取文件
with open('coco.names') as f:
name_list = f.read().split('\n')
print(name_list)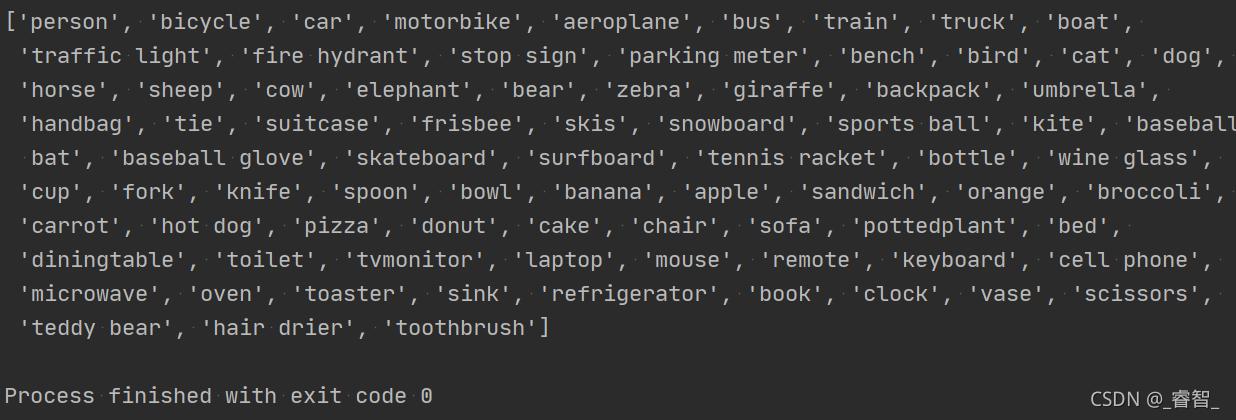
二、神经网络初始化
1、搭建神经网络
根据yolov3官方的设置和权重
global network
model_configuration = 'yolov3.cfg' # 配置模型
model_weights = 'yolov3.weights' # 权重
# 1、创建神经网络
network = cv2.dnn.readNetFromDarknet(model_configuration, model_weights)
# 配置模型 权重2、GPU加速
# 2、GPU加速
network.setPreferableBackend(cv2.dnn.DNN_BACKEND_OPENCV) # 设置opencv作为后端
network.setPreferableTarget(cv2.dnn.DNN_TARGET_CPU)三、打开摄像头、按帧读取图像
def Capture_Init():
global capture, w, h
capture = cv2.VideoCapture(0)
w, h = 320, 320 while True:
global img
success, img = capture.read()
# img = cv2.imread("Resource/test4.jpg")
cv2.imshow('img', img)
# 设置每帧间隔时间(q键退出)
cv2.waitKey(1)
# if cv2.waitKey(1) & 0XFF == ord("q"):
# break
四、向神经网络输入
# 向神经网络输入
Input_to_Network(img)把img的数据变换一下,作为blob输入到image中。
# 向神经网络输入
def Input_to_Network(image):
# 把image转换成blob数据类型(归一化等一系列数据类型转换)(这种方式网络可以理解)
blob = cv2.dnn.blobFromImage(image, 1 / 255, (w, h), [0, 0, 0], 1, crop=False)
# 图像 归一化 宽,高 裁剪结果
# 设置神经网络输入
network.setInput(blob)
print(blob)
五、获取神经网络输出
1、获取各层名称
# 神经网络各层名称
layersNames = network.getLayerNames()
print(layersNames)
2、获取输出层名称
# 2、获取神经网络输出层名称
outputNames = [(layersNames[i[0] - 1]) for i in network.getUnconnectedOutLayers()]
print(outputNames)![]()
3、获取输出层图像(内容)
# 3、获取输出层图像(内容)
# outputs:3个特征图:分别为小、中、大。(13*13、26*26、52*52)
# 每个特征图又输出85个类别
outputs = network.forward(outputNames)
# print(outputs[0].shape)
# print(outputs[1].shape)
# print(outputs[2].shape)
# print(outputs[0][0])
return outputs# 获取神经网络输出
def Network_Output():
# 神经网络各层名称
layersNames = network.getLayerNames()
# 神经网络输出层名称
outputNames = [(layersNames[i[0] - 1]) for i in network.getUnconnectedOutLayers()]
# outputs:3个特征图:分别为小、中、大。(13*13、26*26、52*52)
# 每个特征图又输出85个类别
outputs = network.forward(outputNames)
# print(outputs[0].shape)
# print(outputs[1].shape)
# print(outputs[2].shape)
# print(outputs[0][0])
return outputs得到图中的一系列结果:
预测框坐标、长宽、置信度、各分类的预测分数。
[5.9418369e-02 7.4009120e-02 5.7651168e-01 1.6734526e-01 6.5560471e-07
0.0000000e+00 0.0000000e+00 0.0000000e+00 0.0000000e+00 0.0000000e+00
0.0000000e+00 0.0000000e+00 0.0000000e+00 0.0000000e+00 0.0000000e+00
0.0000000e+00 0.0000000e+00 0.0000000e+00 0.0000000e+00 0.0000000e+00
0.0000000e+00 0.0000000e+00 0.0000000e+00 0.0000000e+00 0.0000000e+00
0.0000000e+00 0.0000000e+00 0.0000000e+00 0.0000000e+00 0.0000000e+00
0.0000000e+00 0.0000000e+00 0.0000000e+00 0.0000000e+00 0.0000000e+00
0.0000000e+00 0.0000000e+00 0.0000000e+00 0.0000000e+00 0.0000000e+00
0.0000000e+00 0.0000000e+00 0.0000000e+00 0.0000000e+00 0.0000000e+00
0.0000000e+00 0.0000000e+00 0.0000000e+00 0.0000000e+00 0.0000000e+00
0.0000000e+00 0.0000000e+00 0.0000000e+00 0.0000000e+00 0.0000000e+00
0.0000000e+00 0.0000000e+00 0.0000000e+00 0.0000000e+00 0.0000000e+00
0.0000000e+00 0.0000000e+00 0.0000000e+00 0.0000000e+00 0.0000000e+00
0.0000000e+00 0.0000000e+00 0.0000000e+00 0.0000000e+00 0.0000000e+00
0.0000000e+00 0.0000000e+00 0.0000000e+00 0.0000000e+00 0.0000000e+00
0.0000000e+00 0.0000000e+00 0.0000000e+00 0.0000000e+00 0.0000000e+00
0.0000000e+00 0.0000000e+00 0.0000000e+00 0.0000000e+00 0.0000000e+00]
六、框出物体
# 框出物体
def GetObject(outputs, image):
# 创建参数列表
h_p, w_p, c_p = image.shape # 图像的高、宽、通道数
bboxes = [] # 预测框
classIds = [] # 分类索引
confidences = [] # 置信度1、获取所有预测框情况
逐特征图输出
# 逐特征图输出
for output in outputs:逐框输出
# 逐框输出
for one_class in output:单预测框结果
# 算出每个框的预测情况
# 先得到其85分类,每个分类的得分,再获取最大得分的下标作为索引,最后得到其置信度
scores = one_class[5:] # 获取所有得分
classId = np.argmax(scores) # 获取分类索引
confidence = scores[classId] # 获取置信度置信度过半时,把预测框认为可能的预测结果存入列表
# 加入预测到的物体(认为可能的物体)
if confidence > 0.5:
# 获取预测框宽高、坐标
w_b, h_b = int(one_class[2] * w_p), int(one_class[3] * h_p)
x, y = int((one_class[0] * w_p) - w_b / 2), int((one_class[1] * h_p) - h_b / 2)
# (中心点x、y坐标)
bbox = [x, y, w_b, h_b]
# 把参数加入列表(预测框参数、分类索引、置信度)
bboxes.append(bbox) # 预测框参数
classIds.append(classId) # 分类索引
confidences.append(float(confidence)) # 置信度
print(confidences)2、保留一个预测框
根据置信度、NMS进行非极大值抑制。 (前面对置信度已经有过一次过滤,这次可以不再设置置信度阈值)。
# 保留一个预测框(从置信度阈值、NMS阈值进行设置)
indices = cv2.dnn.NMSBoxes(bboxes, confidences, 0.5, 0.1)
# 预测框 置信度 置信度阈值 NMS阈值(非极大值抑制)3、画出预测框
# 输出预测框
for i in indices:
i = i[0]
box = bboxes[i]
x, y, w, h = box[0], box[1], box[2], box[3]
# print(x,y,w,h)
cv2.rectangle(image, (x, y), (x + w, y + h), (255, 0, 255), 2)
cv2.putText(image, f'{name_list[classIds[i]].upper()} {int(confidences[i] * 100)}%',
(x, y - 10), cv2.FONT_HERSHEY_SIMPLEX, 0.6, (255, 0, 255), 2)
cv2.imshow('image', image) 
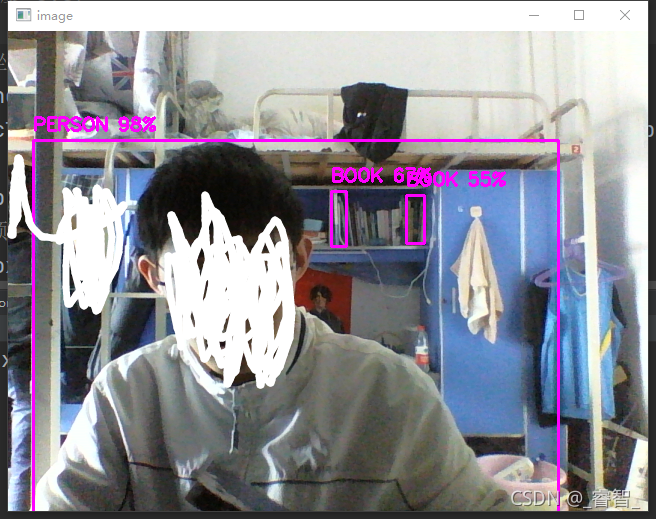
预测最大的问题就是比较慢,用tiny的话足够快,但是不准确,还有很大的提升空间。
总代码
import cv2
import numpy as np
# 读取文件
def ReadFile():
global name_list
name_list = []
# 读取文件
with open('yolo/coco.names') as f:
name_list = f.read().split('\n')
# print(name_list)
# 搭建神经网络
def Network_Init():
global network
model_configuration = 'yolo/yolov3.cfg' # 配置模型
model_weights = 'yolo/yolov3.weights' # 权重
# 1、创建神经网络
network = cv2.dnn.readNetFromDarknet(model_configuration, model_weights)
# 配置模型 权重
# 2、GPU加速
network.setPreferableBackend(cv2.dnn.DNN_BACKEND_OPENCV) # 设置opencv作为后端
network.setPreferableTarget(cv2.dnn.DNN_TARGET_CPU)
# print(network)
# 打开摄像头
def Capture_Init():
global capture, w, h
capture = cv2.VideoCapture(0)
w, h = 320, 320
# 向神经网络输入
def Input_to_Network(image):
# 把image转换成blob数据类型(归一化等一系列数据类型转换)(这种方式网络可以理解)
blob = cv2.dnn.blobFromImage(image, 1 / 255, (w, h), [0, 0, 0], 1, crop=False)
# 图像 归一化 宽,高 裁剪结果
# 设置神经网络输入
network.setInput(blob)
# print(blob)
# 获取神经网络输出
def Network_Output():
# 1、获取神经网络各层名称
layersNames = network.getLayerNames()
# 2、获取神经网络输出层名称
outputNames = [(layersNames[i[0] - 1]) for i in network.getUnconnectedOutLayers()]
# print(outputNames)
# 3、获取输出层图像(内容)
# outputs:3个特征图:分别为小、中、大。(13*13、26*26、52*52)
# 每个特征图又输出85个类别
outputs = network.forward(outputNames)
# print(outputs[0].shape)
# print(outputs[1].shape)
# print(outputs[2].shape)
# print(outputs[0][0])
return outputs
# 框出物体
def GetObject(outputs, image):
# 创建参数列表
h_p, w_p, c_p = image.shape # 图像的高、宽、通道数
bboxes = [] # 预测框
classIds = [] # 分类索引
confidences = [] # 置信度
# 1、获取所有预测框的情况
# outputs:小、中、大三个特征图
# output:小、中、大单个特征图
# oneclass:小、中、大每个分类
# 逐特征图输出
for output in outputs:
# 逐框输出
for one_class in output:
# 算出每个框的预测结果
# 先得到其85分类,每个分类的得分,再获取最大得分的下标作为索引,最后得到其置信度
scores = one_class[5:] # 获取所有得分
classId = np.argmax(scores) # 获取分类索引
confidence = scores[classId] # 获取置信度
# 加入预测到的物体(认为可能的物体)
if confidence > 0.5:
# 获取预测框宽高、坐标
w_b, h_b = int(one_class[2] * w_p), int(one_class[3] * h_p)
x, y = int((one_class[0] * w_p) - w_b / 2), int((one_class[1] * h_p) - h_b / 2)
# (中心点x、y坐标)
bbox = [x, y, w_b, h_b]
# 把参数加入列表(预测框参数、分类索引、置信度)
bboxes.append(bbox) # 预测框参数
classIds.append(classId) # 分类索引
confidences.append(float(confidence)) # 置信度
print(confidences)
# 保留一个预测框(从置信度阈值、NMS阈值进行设置)
indices = cv2.dnn.NMSBoxes(bboxes, confidences, 0.5, 0.1)
# 预测框 置信度 置信度阈值 NMS阈值(非极大值抑制)
# 输出预测框
for i in indices:
i = i[0]
box = bboxes[i]
x, y, w, h = box[0], box[1], box[2], box[3]
# print(x,y,w,h)
cv2.rectangle(image, (x, y), (x + w, y + h), (255, 0, 255), 2)
cv2.putText(image, f'{name_list[classIds[i]].upper()} {int(confidences[i] * 100)}%',
(x, y - 10), cv2.FONT_HERSHEY_SIMPLEX, 0.6, (255, 0, 255), 2)
cv2.imshow('image', image)
if __name__ == '__main__':
ReadFile() #读取文件
Network_Init() #神经网络初始化
Capture_Init() #摄像头初始化
while True:
global img
# success, img = capture.read()
img = cv2.imread("Resource/test4.jpg")
# 向神经网络输入
Input_to_Network(img)
# 获取神经网络输出
outputs = Network_Output()
# 框出物体
GetObject(outputs, img)
# 设置每帧间隔时间(q键退出)
cv2.waitKey(1)
# if cv2.waitKey(1) & 0XFF == ord("q"):
# break
cv2.waitKey(0)














 136
136











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











