









目录
1 安装sw_urdf_exporter
准备工作:下载sw_urdf_exporter:http://wiki.ros.org/sw_urdf_exporter 并安装
2 准备模型
- 库卡官网下载stl模型
- 使用solidwork将模型打散,每个关节与基座都另存成一个单独的 SLDPRT文件
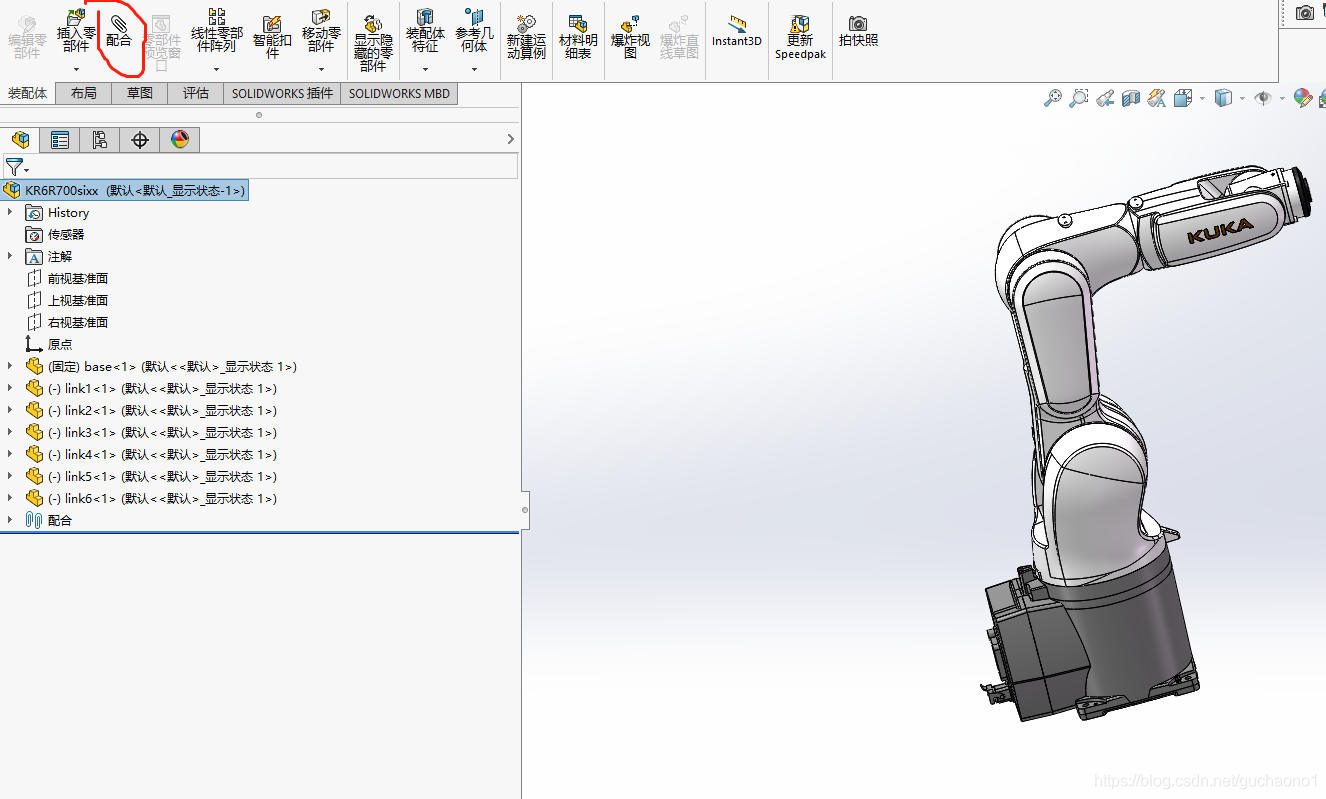
- 新建一个装配体文件,导入各个关节与基座的SLDPRT文件,并按照-----面重合 ----轴线重合方式 重新配合
3 建立各个关节的关节坐标系
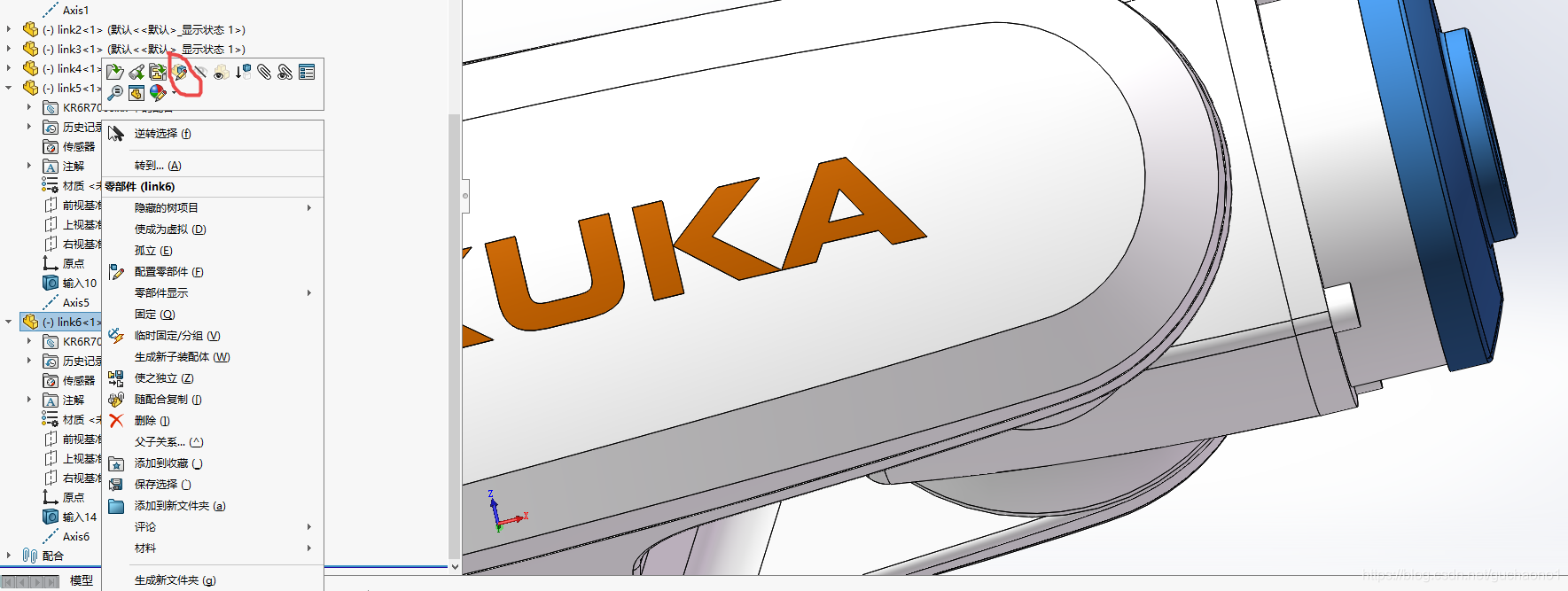
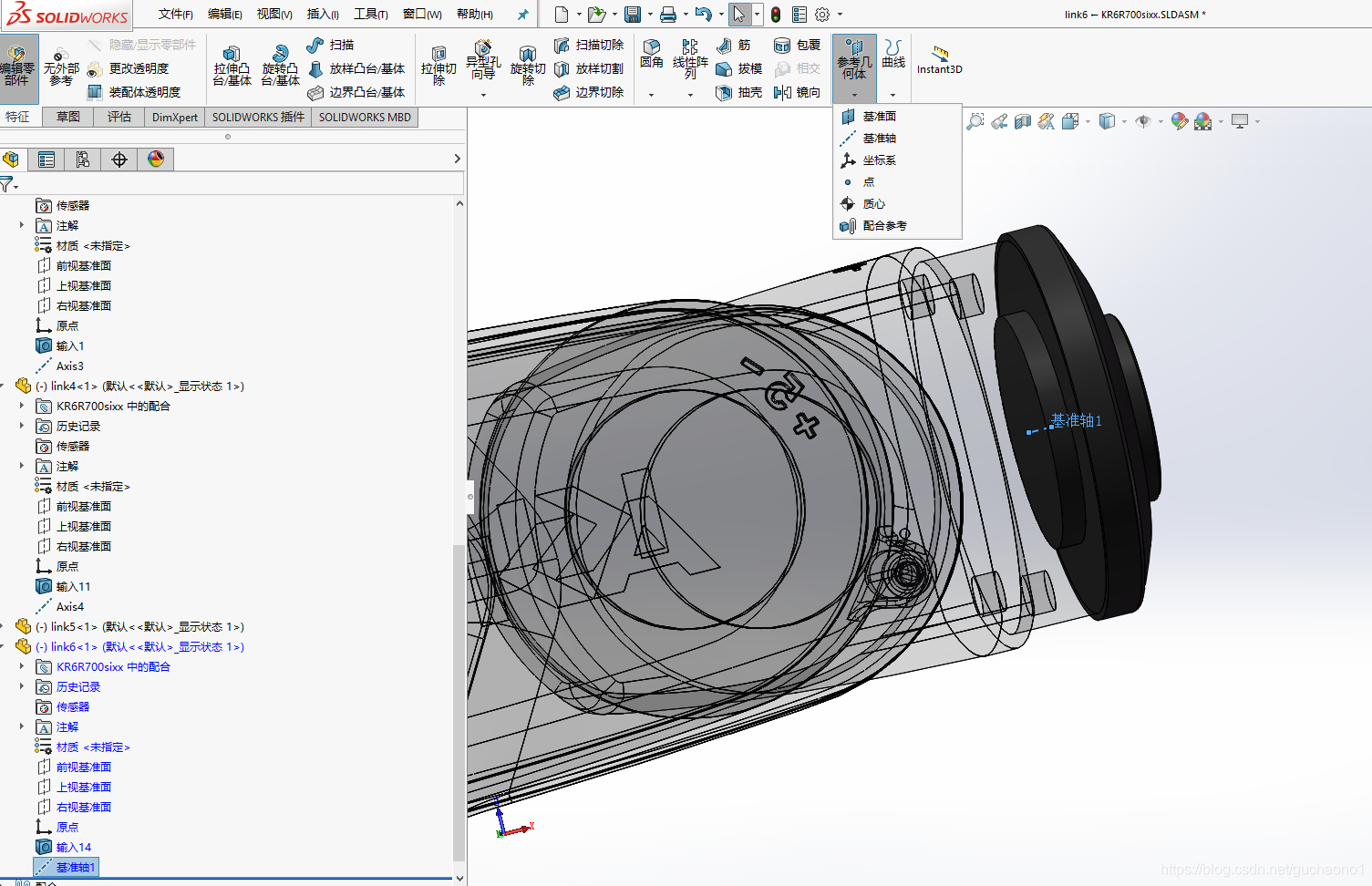
3.1、对各个关节提取基准轴
以关节6为例 命名为Axis6
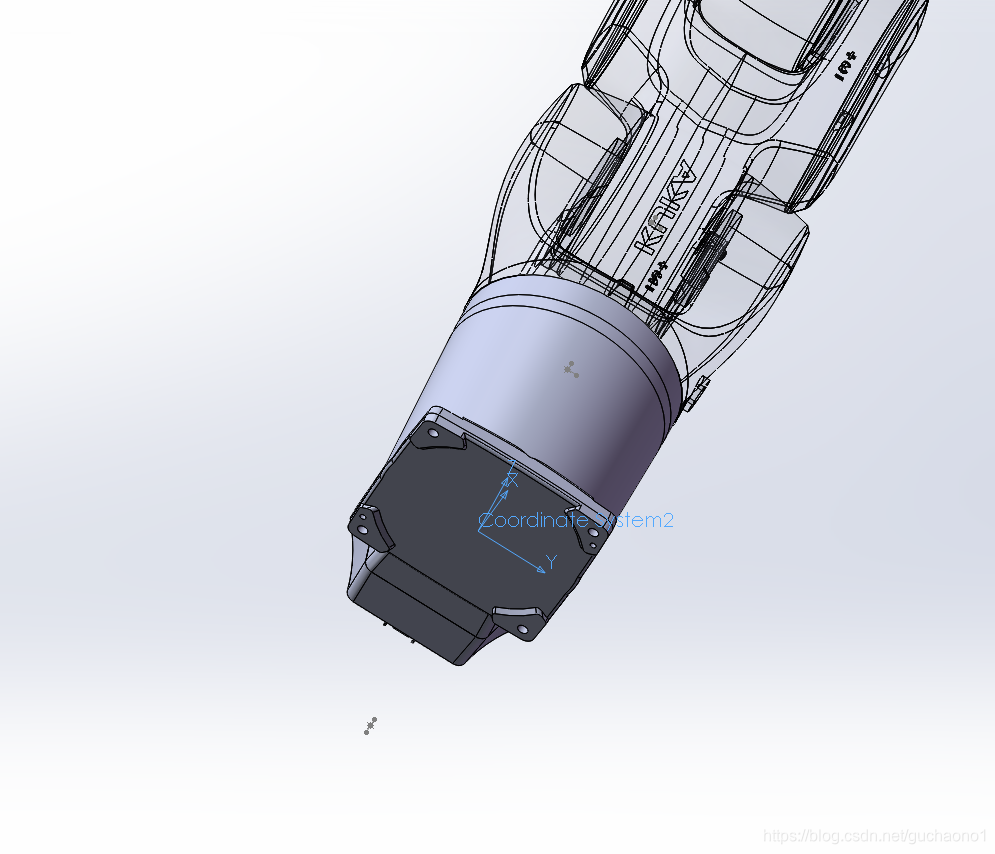
3.2、对基座及各个关节建立建立坐标系
注意:所建立的坐标系不能处在零件内部,要在装配体树形目录下
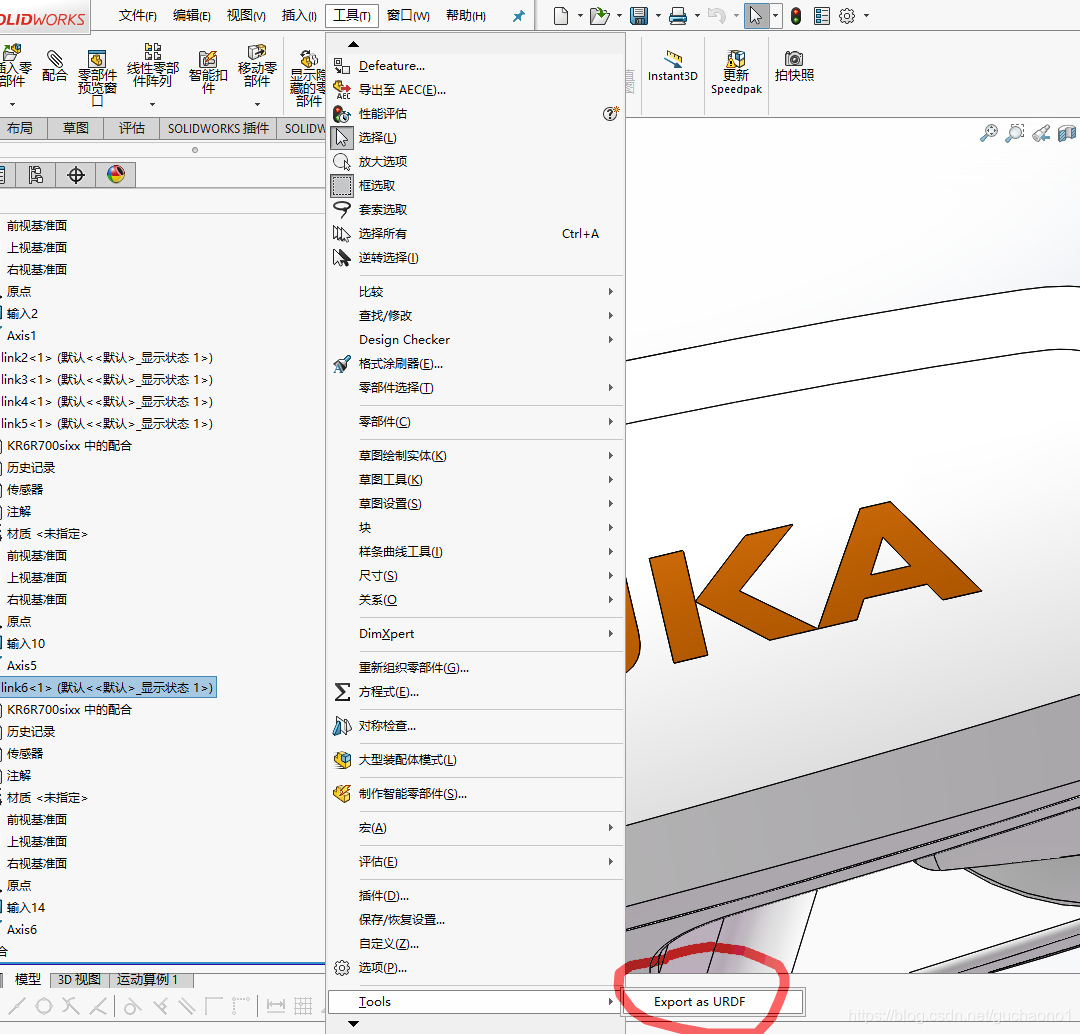
3.3 导出 urdf
点击工具--tool---export as URDF
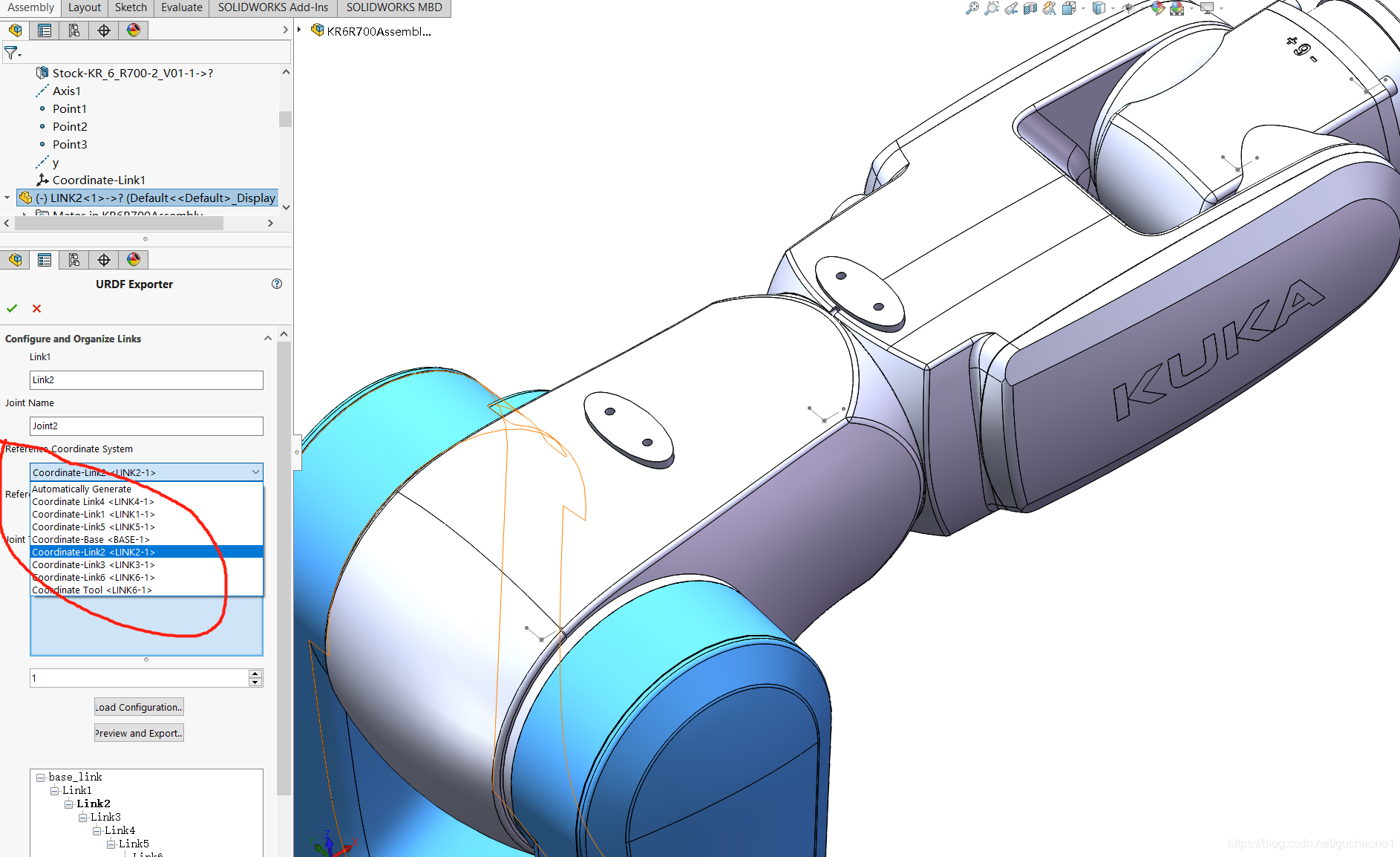
3.4 配置URDF
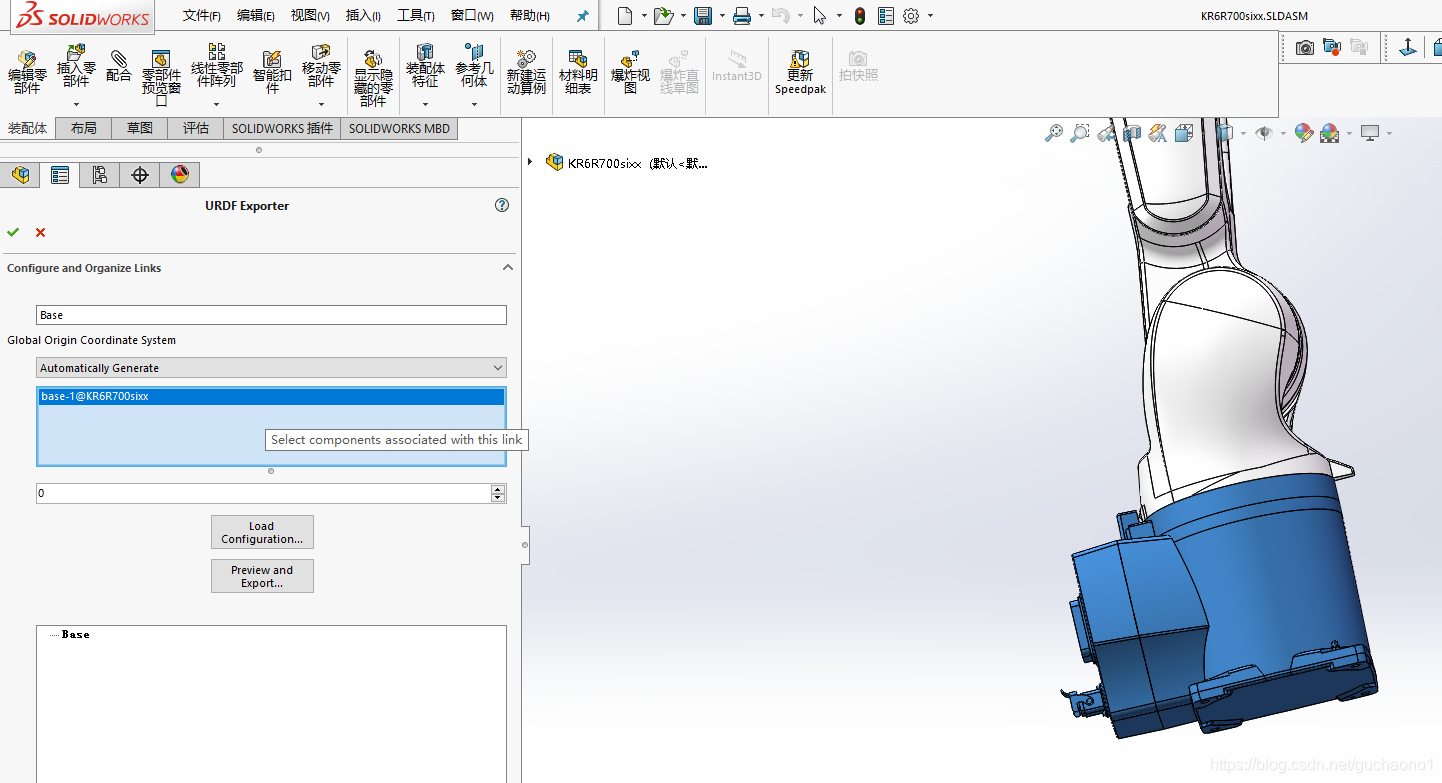
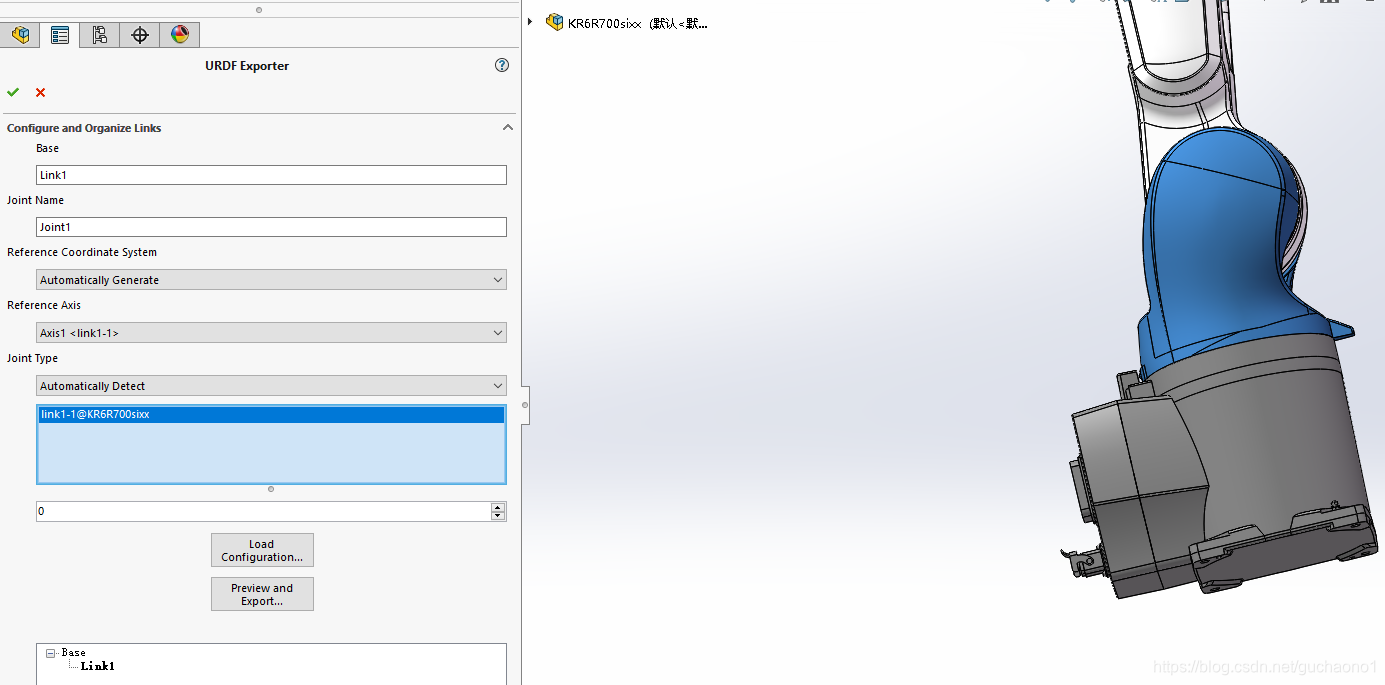
选择之前建好的坐标系

















 1466
1466

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









